
.png)
東方馬達
Oriental motor
步進馬達 αSTEP AR系列(脈波輸入型)
脈波輸入型 AC/DC電源規格 系列
透過高效率化技術,大幅降低馬達的發熱。
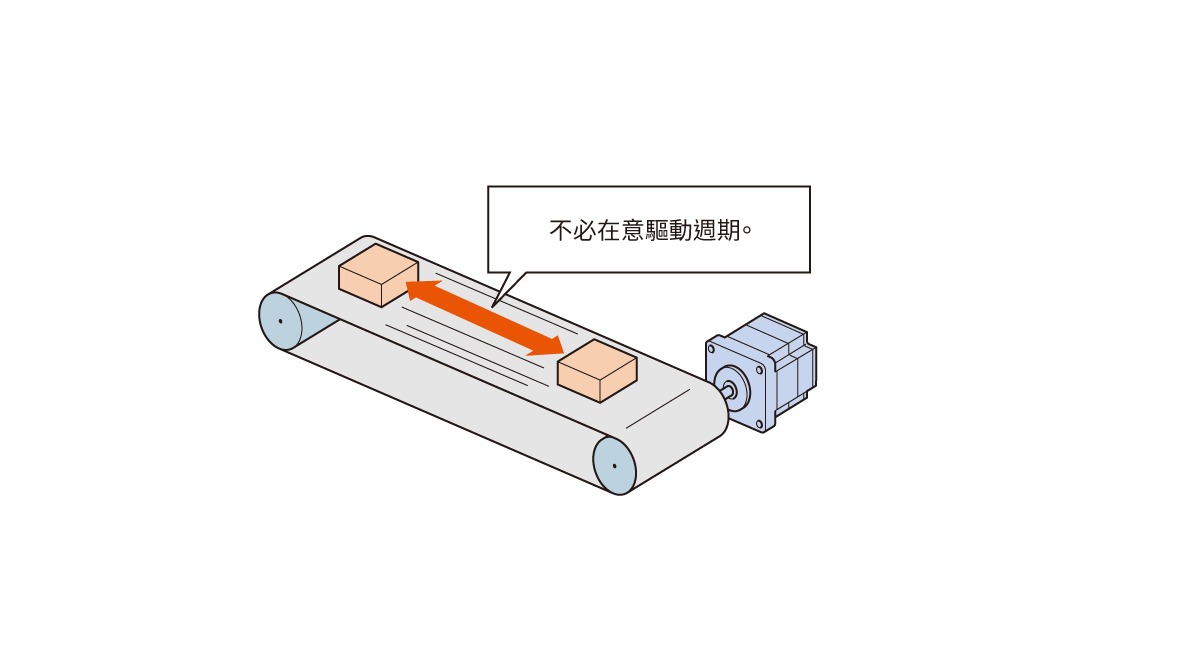
不必在意驅動週期,即可實現步進馬達擅長的短距離短時間反覆定位。
*新增直交軸 FC減速機型。
內容大綱 (點擊展開)
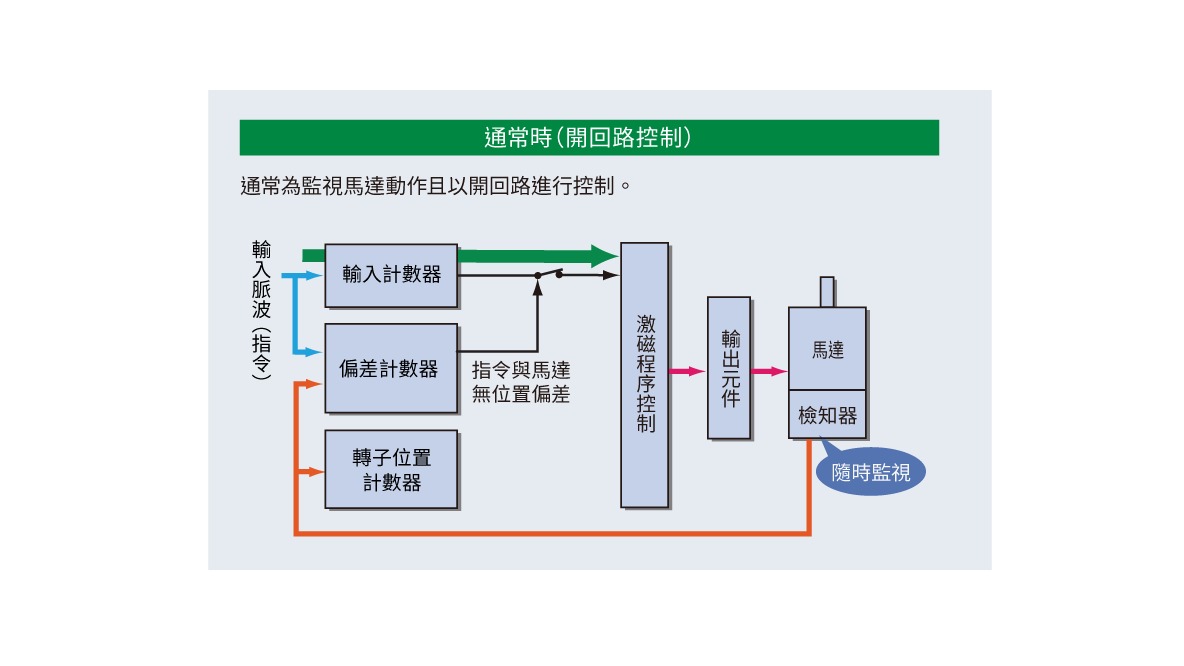
αSTEP是以步進馬達為基礎的馬達,採用獨創的混合式控制方式,兼具「開回路控制」與「閉回路控制」的優點。透過轉子位置檢知器隨時監視馬達位置同時,依據狀況自動切換2種控制。
▎通常為開回路控制,使用方便性等同步進馬達
█ 高響應
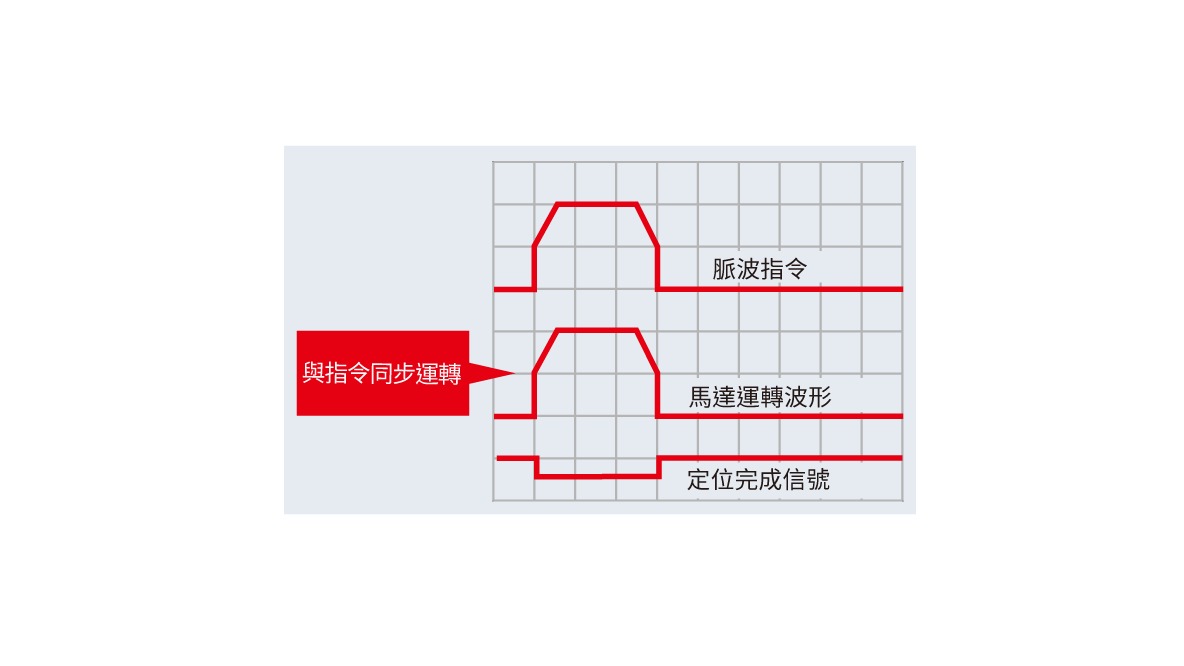
活用步進馬達的高響應,可在短時間內移動短距離。針對指令可立即追蹤驅動馬達。
█ 在無微振狀態下保持停止位置
定位時不微振,靠馬達本身的保持力停止,最適合停止時不能有振動的低剛性機構用途。
█ 無需增益調整
平常是以開回路控制運轉,因此有皮帶機構或凸輪、鏈條驅動等的負載變動等時,也無需增益調整即可定位。
▎過負載時為閉回路控制,運轉更加確實
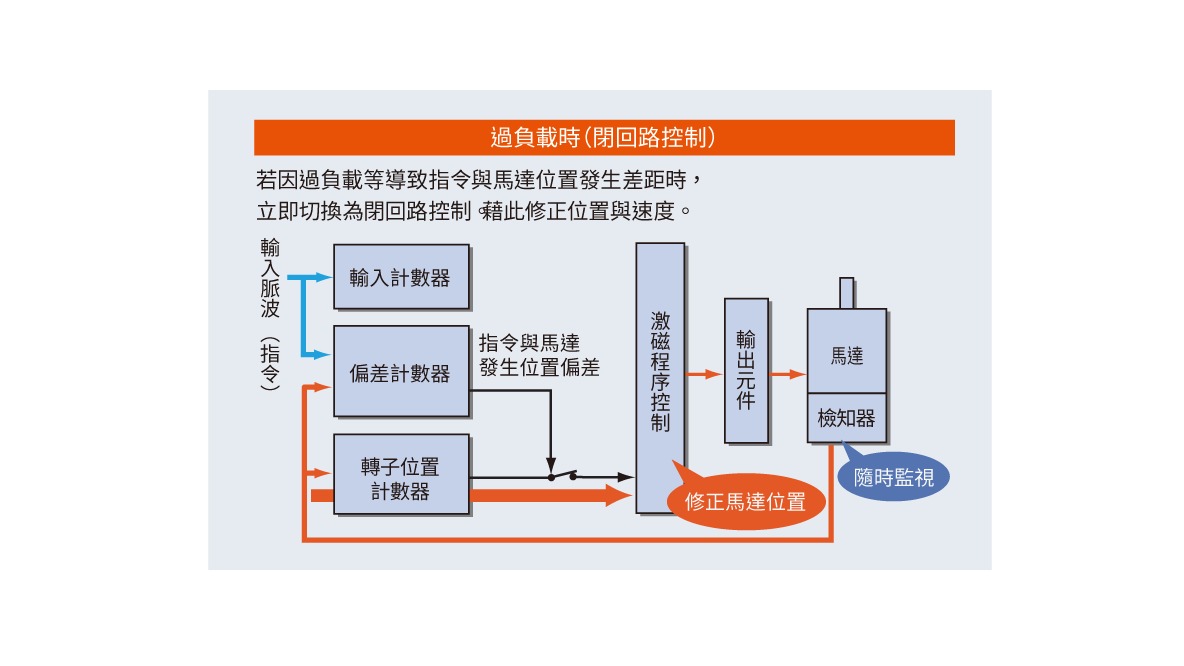
█ 即使負載急遽變動、急速加速,仍可繼續運轉
正常時是與指令同步,以開回路控制運轉。當過負載時立即切換成閉回路控制,進行位置修正。
█ 萬一發生異常時輸出Alarm信號
施加連續過負載時會輸出Alarm信號,定位完成時會輸出END信號。因此也具備和伺服馬達一樣的穩定性。
▎低速也能順暢動作
透過標準搭載的微步級驅動、平滑驅動功能*,降低在低速下的振動,可以順暢驅動。
*是指無需變更脈波輸入設定,能以全步級時相同之移動量、移動速度自動進行微步級驅動的控制功能。
*是指無需變更脈波輸入設定,能以全步級時相同之移動量、移動速度自動進行微步級驅動的控制功能。
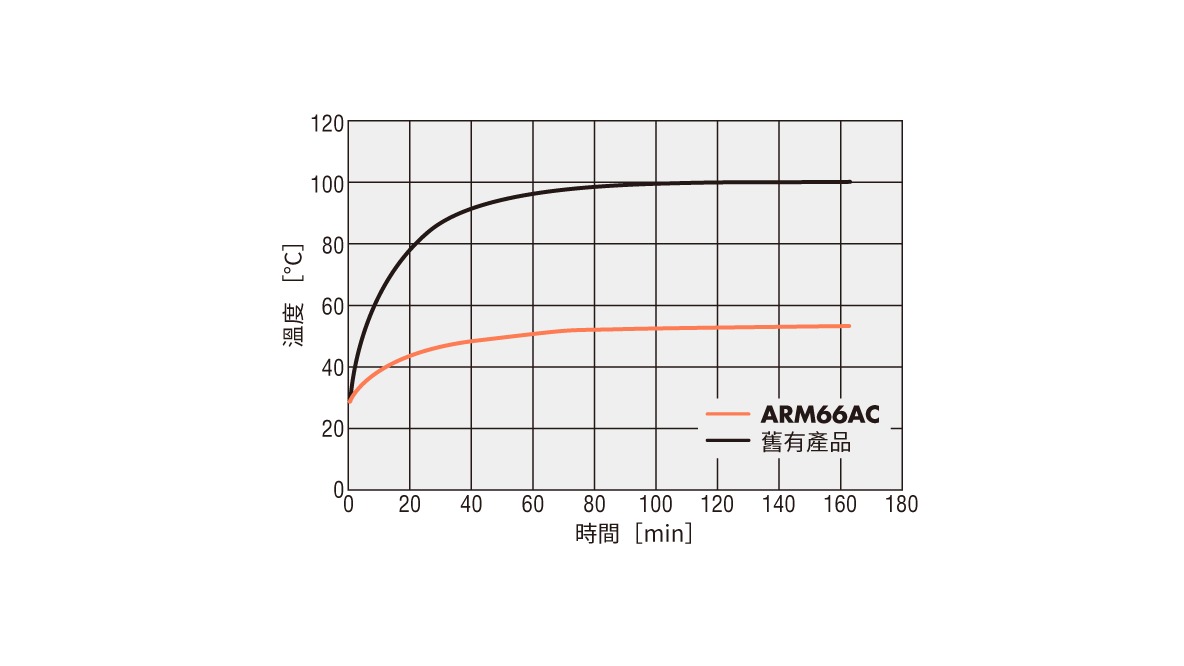
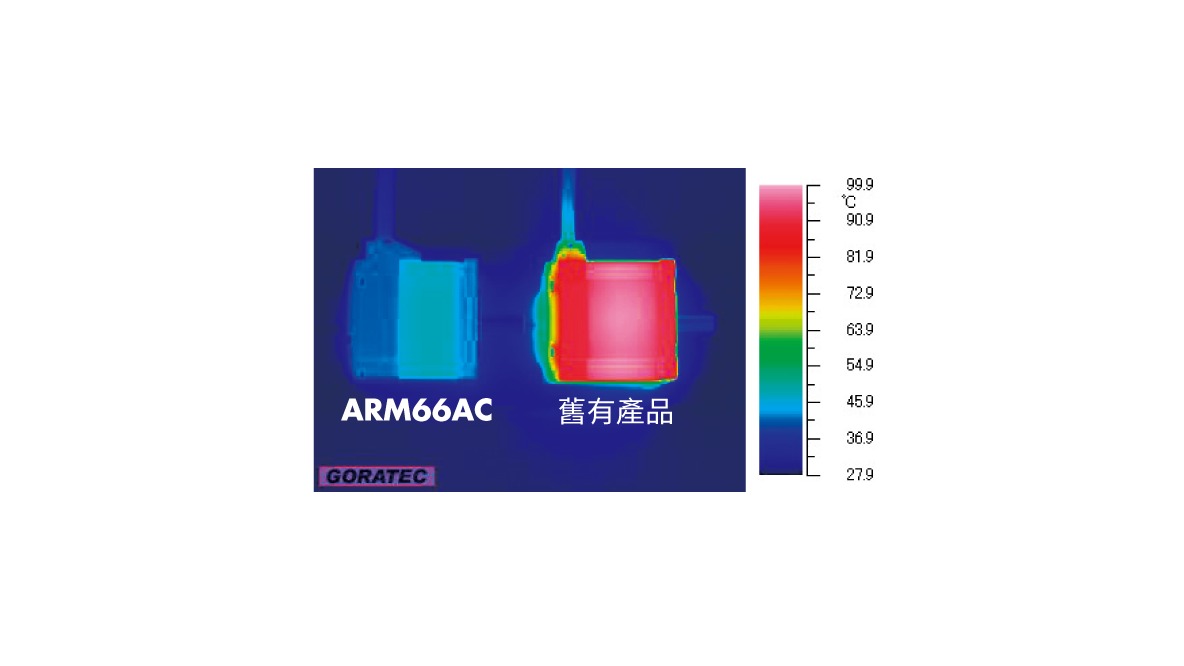
▎可透過高效技術減低馬達降低發熱,實現連續運轉
█ 發熱量大幅減低
| 利用熱影像觀察溫度分布 | 同一條件運轉時的馬達外表溫度 |
|
此為在同一條件下運轉時的示意圖。 |
 |
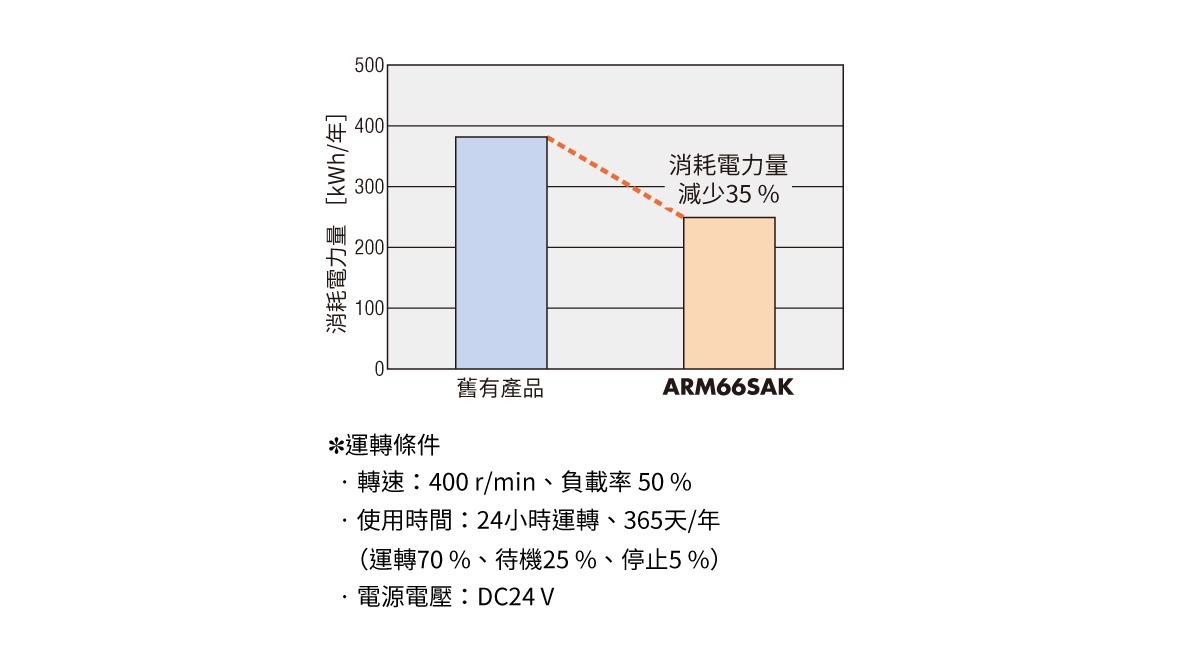
█ 透過節能功能減少消耗電力
| AC電源輸入 消耗電力量較過去減少45%(本公司比) |
DC電源輸入 消耗電力量較過去減少35%(本公司比) |
 |
 |
█ 連續運轉(高頻率的運轉)
可進行高頻率的運轉。可連續驅動馬達。
注意事項
連續運轉時,需要以下尺寸的鋁板散熱板。
.AC電源輸入:250×250mm,厚度6mm
.DC電源輸入:100×100mm,厚度6mm
連續運轉時,需要以下尺寸的鋁板散熱板。
.AC電源輸入:250×250mm,厚度6mm
.DC電源輸入:100×100mm,厚度6mm
▎搭載轉子位置檢知器(Resolver)
轉子位置檢知器係利用檢知器轉子的小齒與定子小齒間之空間距離的變動而產生的電感變化,以檢知轉子的位置資訊。

▎步進馬達的輸出參考值(僅限AC電源輸入)
伺服馬達的輸出(W)是將「額定轉速」運轉時的輸出(W)標示為「額定輸出」。
另一方面,由於步進馬達具有高精度定位、中低速高扭矩的特點,因此無「額定轉速」,故無需標示「額定輸出」。
另一方面,由於步進馬達具有高精度定位、中低速高扭矩的特點,因此無「額定轉速」,故無需標示「額定輸出」。
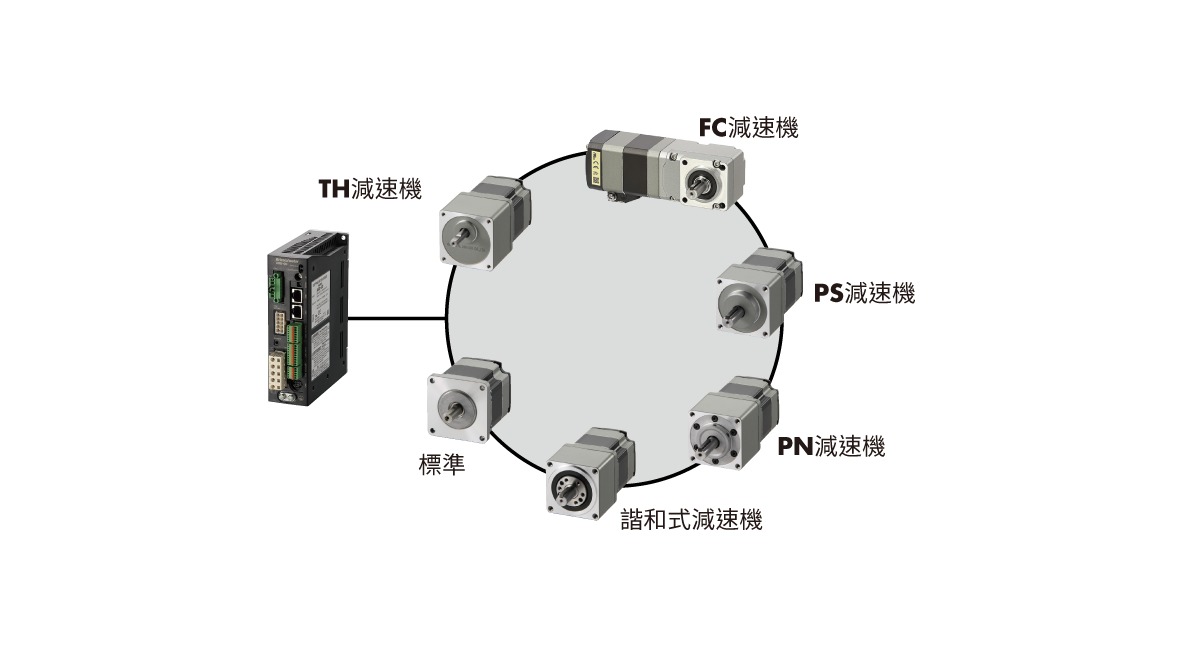
▎可利用1台驅動器對應各種馬達
可利用1台驅動器,與標準型、減速機型等各個種類的馬達連接。不必針對各組合的馬達變更驅動器機種,維修處置簡單。驅動器搭載自動認知功能,可區分與驅動器連接的馬達種類。
轉子位置檢知器係利用檢知器轉子的小齒與定子小齒間之空間距離的變動而產生的電感變化,以檢知轉子的位置資訊。
轉子位置檢知器係利用檢知器轉子的小齒與定子小齒間之空間距離的變動而產生的電感變化,以檢知轉子的位置資訊。
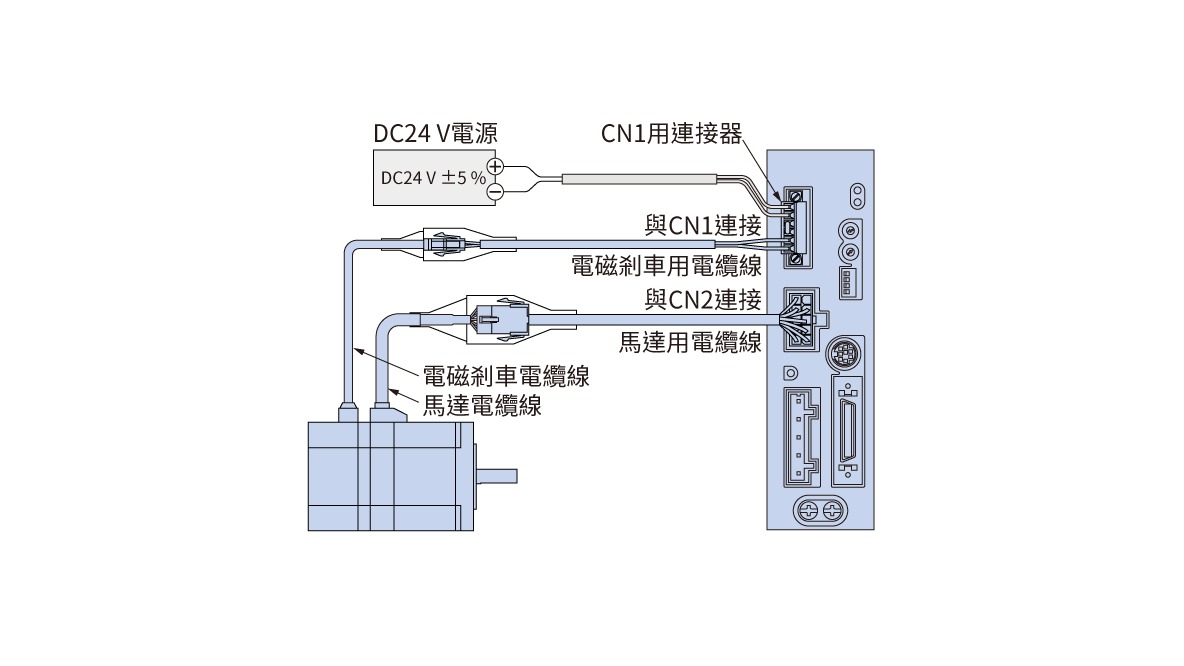
AC電源輸入例
▎易於使用,功能強大
█ 電磁剎車自動控制(DC電源輸入脈波列輸入型除外)
若使馬達激磁(電流ON輸入ON)則解除電磁剎車,若切斷激磁(電流ON輸入OFF)則電磁剎車加以保持。不需另備電磁剎車控制回路。
注意事項
AC電源輸入 若為脈波列輸入型,則必須準備電磁剎車用DC24 V電源。
AC電源輸入 若為脈波列輸入型,則必須準備電磁剎車用DC24 V電源。
█ 主電源與控制電源分離
有別於主電源,設置控制電源輸入用端子。即使因緊急停止等而阻隔主電源,只要對控制電源輸入端子供電(DC24 V),即可進行位置檢知、Alarm內容確認等。脈波列輸入型時,僅主電源供電亦可運轉。
█ 馬達與驅動器間的最大延長距離為30m
使用連接用電纜線,馬達和驅動器最大可延長至 30m,亦備有中繼電纜線和可動電纜線。
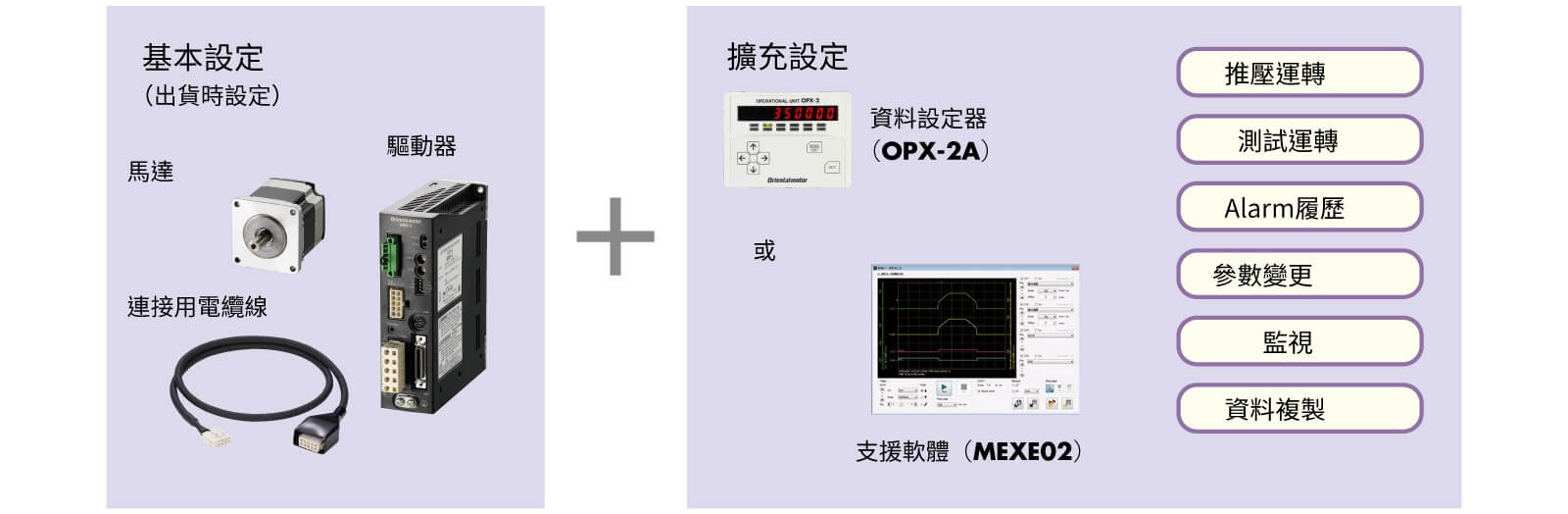
█ 推壓運轉
連續加壓負載。達到負載後,將形成推壓運轉狀態,可利用一定轉矩進行加壓。
注意事項
.進行推壓運轉時,需要有資料設定器OPX-2A(另售)或支援軟體MEXE02。
.減速機型請勿進行推壓運轉。可能造成馬達或減速機損壞。
.進行推壓運轉時,需要有資料設定器OPX-2A(另售)或支援軟體MEXE02。
.減速機型請勿進行推壓運轉。可能造成馬達或減速機損壞。
█ 可同方向進行位置管理
利用循環功能,即使是反覆同方向定位等用途,亦可進行位置管理。
▎輕巧的小型驅動器(僅限DC電源輸入)
這有助於節省電控箱和設備的空間。可直接安裝在DIN導軌上。

█ 對應DC48 V
電源規格為DC24 V或DC48 V。可配合客戶的電源環境使用。以DC48 V使用時,轉矩高於DC24 V。(安裝尺寸20 mm、28 mm僅限DC24 V輸入。)
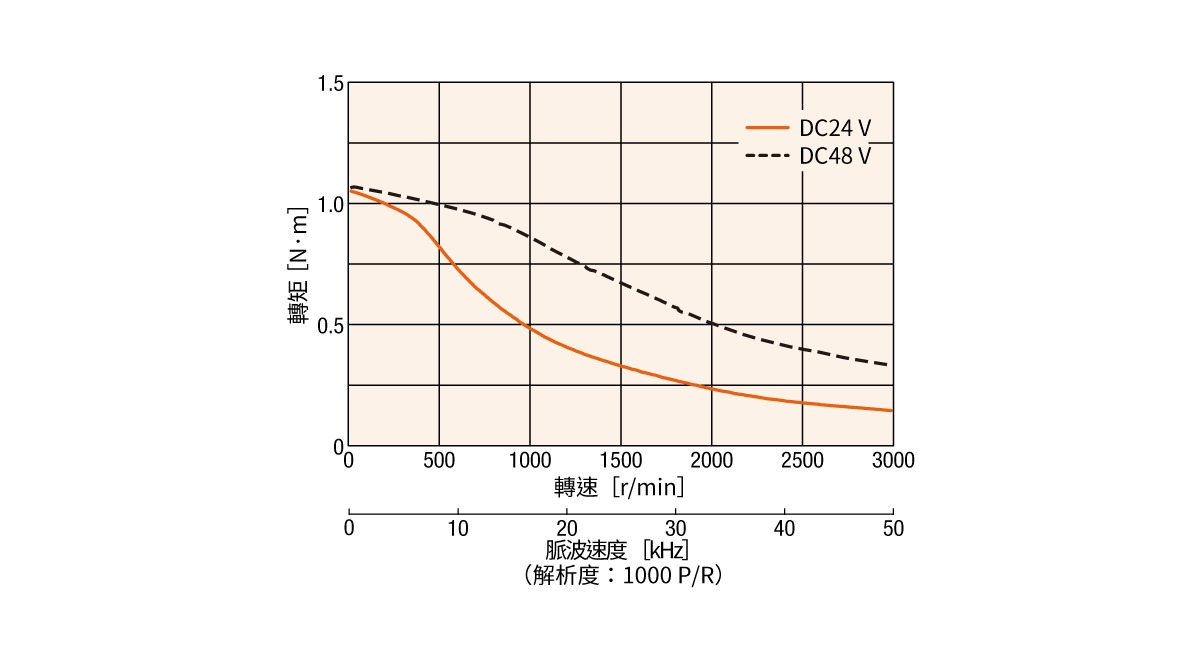
ARM66SAK DC24 V、DC48 V的比較
▎使步進馬達的特性更為進化、更方便使用
| 低振動 除了微步級驅動方式外,亦搭載平滑驅動,以實現運轉動作。此為不改變脈波輸入設定,即可以全步級時相同的移動量・移動速度,自動進行微步級驅動。 |
角度精度提升 由於電流控制技術提升,使馬達的靜止角度誤差提升。可實現更高精度的定位。 |
|
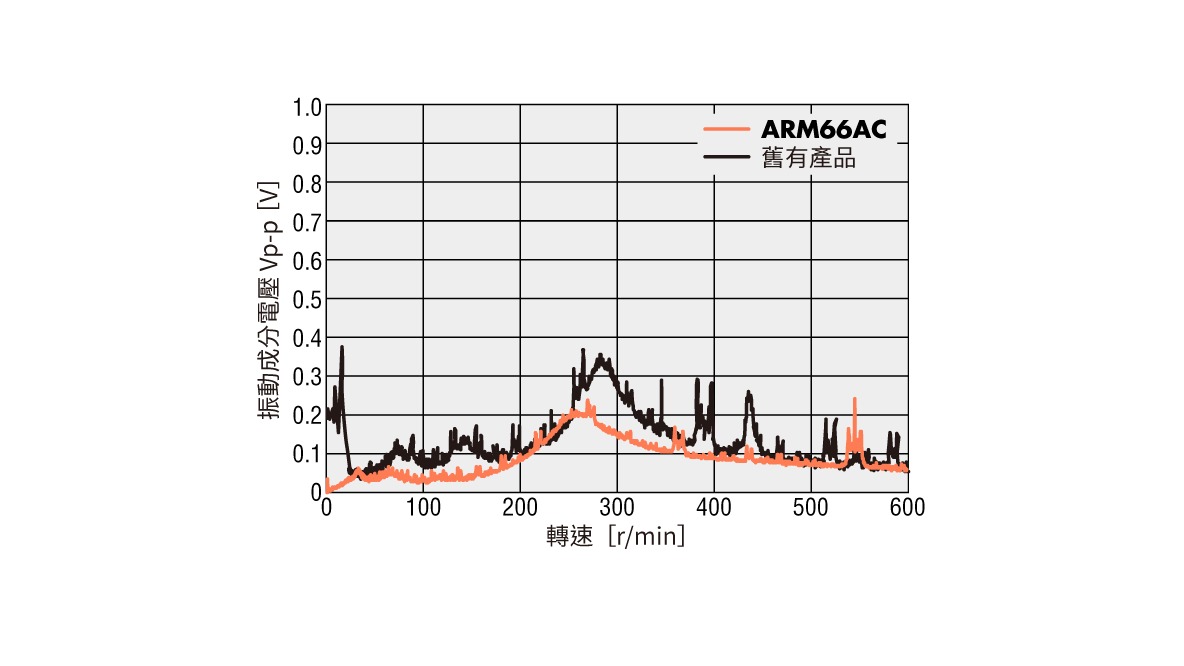 |
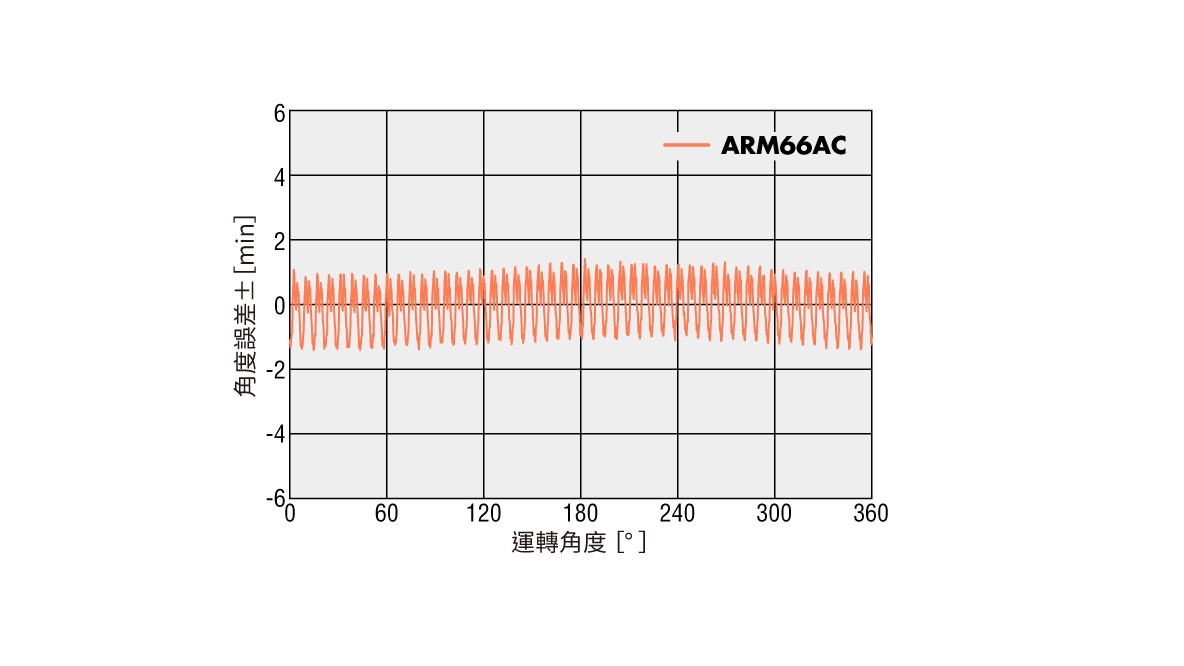 ARM66AC:±3 min/舊有產品:±5 min |
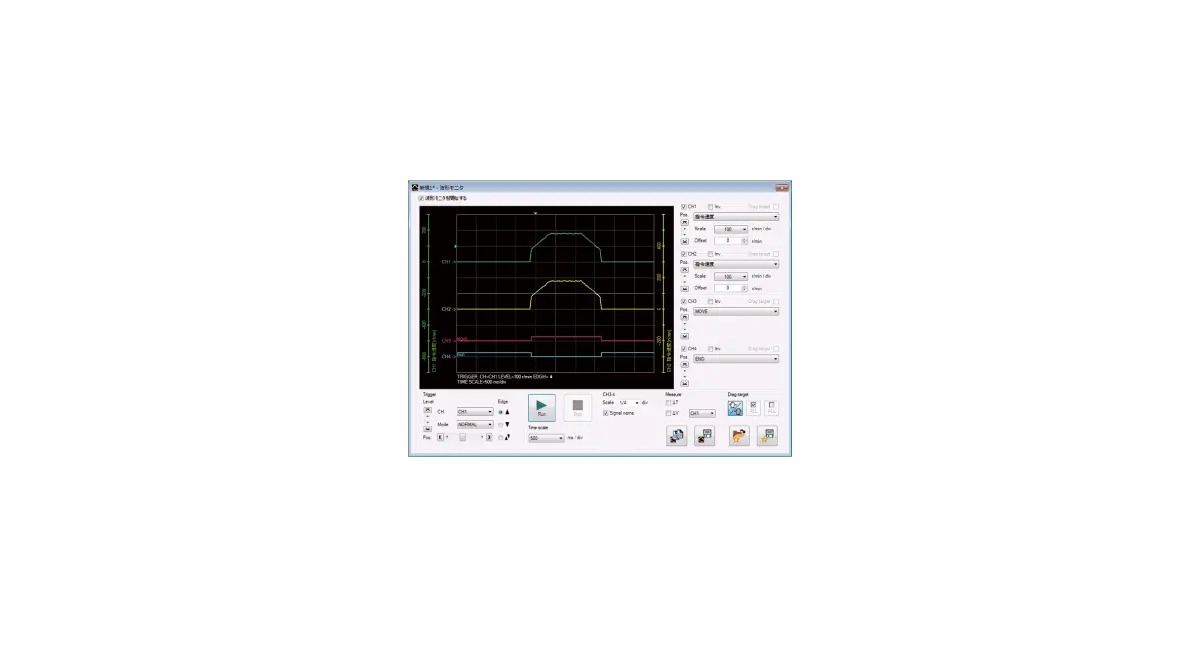
▎輕鬆設定,輕鬆操作
支援軟體MEXE02是從起動到維修皆可支援的軟體。除了可在電腦上設定或編輯運轉資料及各種參數,亦可示教、監視各種狀態。

█ 波形監視
馬達的運轉狀況和I/O狀態一目瞭然的監視功能相當充實。
▎對應各種規格,支援機器設計(僅限AC電源輸入)
█ 保護等級IP65*
馬達的保護等級為IP65* 可防止阻礙正常動作的灰塵侵入。
*不包括馬達安裝面和連接器部分。雙出力軸產品為IP20。
*不包括馬達安裝面和連接器部分。雙出力軸產品為IP20。
█ 對應半導體製造設備規格「SEMI F47」
對應SEMI規格中對電源電壓降低的規格。在半導體製造裝置中使用時相當有效。可評估考慮用於半導體製造裝置。但是,請務必使用實際設備進行評估。
█ 海外安全規格對應品
取得UL/CSA規格認證,並實施C E標誌(低電壓指令、EMC指令)。
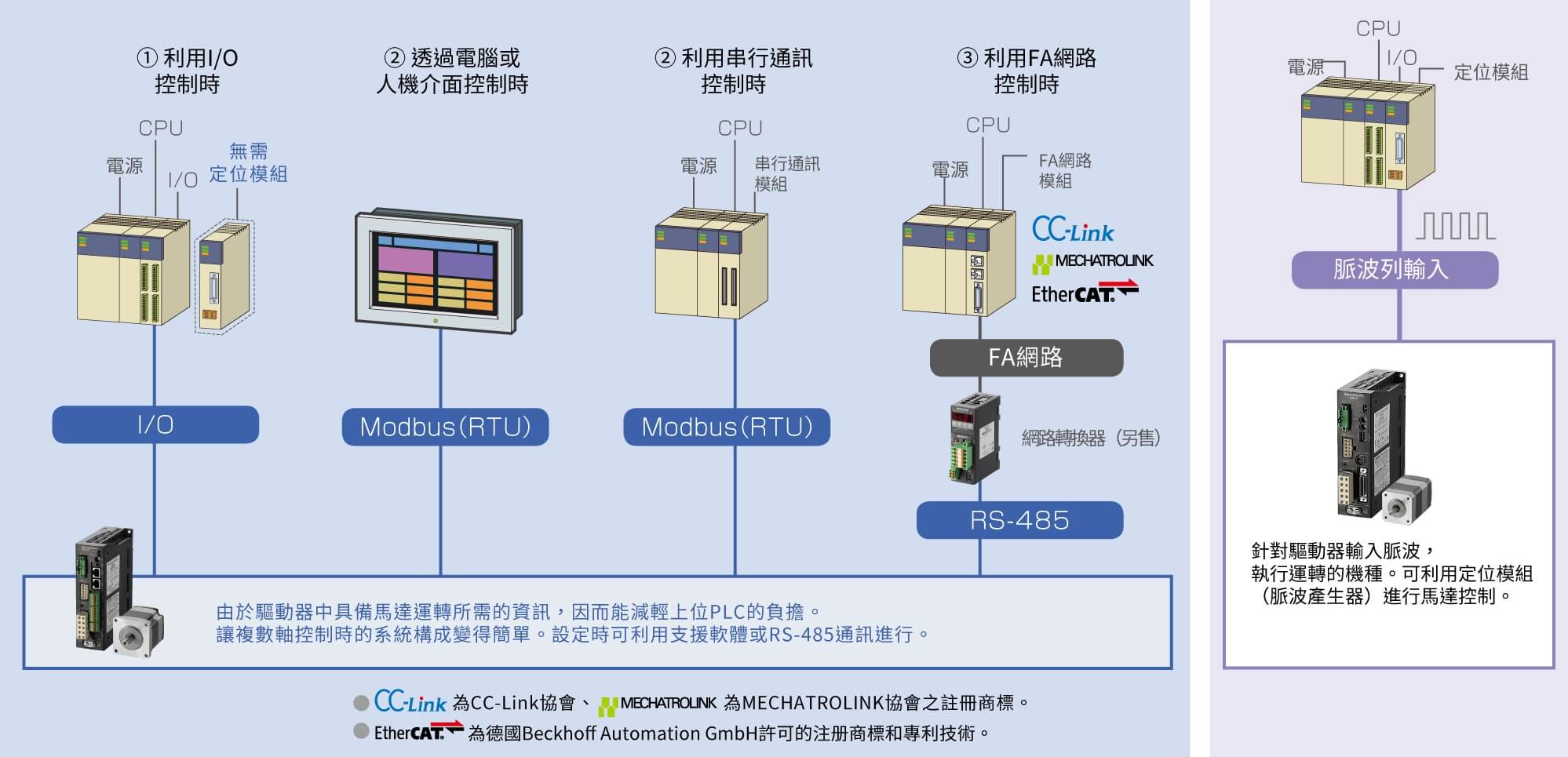
▎脈波列輸入型
脈波列輸入型是透過從定位置單體(脈波產生器)向驅動器輸入脈波信號來驅動運轉。參數設定和監視可透過資料設定器(另售)或支援軟體MEXE02進行。
▎真空型的產品種類
藉由閉回路控制維持高穩定性,可於10-5Pa真空環境下進行定位運轉。透過高效率馬達及驅動器,在低散熱性的真空中也能高轉矩運轉。在真空環境設備內不使用運轉導入機,有助於設備輕巧化。

█ AC規格
| 機型 | 安裝尺寸 | 解析度(1000P/R設定時) | 激磁最大靜止轉矩 |
| [mm] | [˚/脈波] | [N・m] | |
| 標準型 | 42 | 0.36 | 0.3 |
| 60 | 1.2~2 | ||
| 85 | 2~4 | ||
| TH減速機型 | 42 | 0.012 ~0.1 | 0.35~1.5 |
| 60 | 1.25~4 | ||
| 90 | 4.5~12 | ||
| PS減速機型 | 42 | 0.0072~0.072 | 1~3 |
| 60 | 3.5~8 | ||
| 90 | 10~37 | ||
| PN減速機型 | 42 | 0.036~0.072 | 1.35~1.5 |
| 60 | 0.0072~0.072 | 3.5~8 | |
| 90 | 10~37 | ||
| 諧和式減速機型 | 42 | 0.0036~0.0072 | 3.5~5 |
| 60 | 5.5~8 | ||
| 90 | 25~37 | ||
| FC減速機型 | 42 | 0.012~0.05 | 0.7~3 |
| 60 | 2.5~10.5 |
█ DC規格
| 機型 | 安裝尺寸 [mm] |
解析度(1000P/R設定時) [˚/脈波] |
激磁最大靜止轉矩 [N・m] |
| 標準型 | 28 | 0.36 | 0.055~0.12 |
| 42 | 0.3 | ||
| 60 | 1~2 | ||
| 85 | 2 | ||
| TH減速機型 | 28 | 0.012~0.05 | 0.2~0.5 |
| 42 | 0.012 ~0.1 | 0.35~1.5 | |
| 60 | 1.25~4 | ||
| 90 | 4.5~12 | ||
| PS減速機型 | 28 | 0.036~0.072 | 0.2~0.5 |
| 42 | 0.0072~0.072 | 1~3 | |
| 60 | 3.5~8 | ||
| 90 | 10~37 | ||
| PN減速機型 | 28 | 0.036 ~ 0.072 | 0.2~0.5 |
| 42 | 1.35~1.5 | ||
| 60 | 0.0072 ~0.072 | 3.5~8 | |
| 90 | 10~37 | ||
| 諧和式減速機型 | 30 | 0.0036 ~0.0072 | 1.8~2.4 |
| 42 | 3.5~5 | ||
| 60 | 5.5~8 | ||
| 90 | 25~37 |
如需產品圖檔,請洽廣億科技服務人員,謝謝!