
.png)
東方馬達
Oriental motor
步進馬達 αSTEP AZ系列 (內藏定位型)
FLEX 內藏定位型 系列
採用全新開發無需電池的機械式絕對式編碼器。
無需外部檢知器,可高速原點復歸,透過本公司獨創的控制方式,以高穩定性與高效率馬達實現節能效果。
*備有脈波型機種、內藏定位功能機種供您選擇。
▎新開發的ABZO編碼器
小型無需電池的機械式絕對式編碼器。可提高生產力並降低成本。
馬達和驅動器均價格合理。
馬達和驅動器均價格合理。

█ 機械式檢知器
ABZO編碼器搭載複數個齒輪,透過辨識個別齒輪角度來檢知位置資訊。
因此,不需要電池。
因此,不需要電池。
█ 搭載多圈數絕對式編碼器
可從基準原點檢知馬達軸±900圈(1800圈)的絕對位置。
* 安裝尺寸20 mm、28 mm(30 mm)為±450圈(900圈)
* 安裝尺寸20 mm、28 mm(30 mm)為±450圈(900圈)
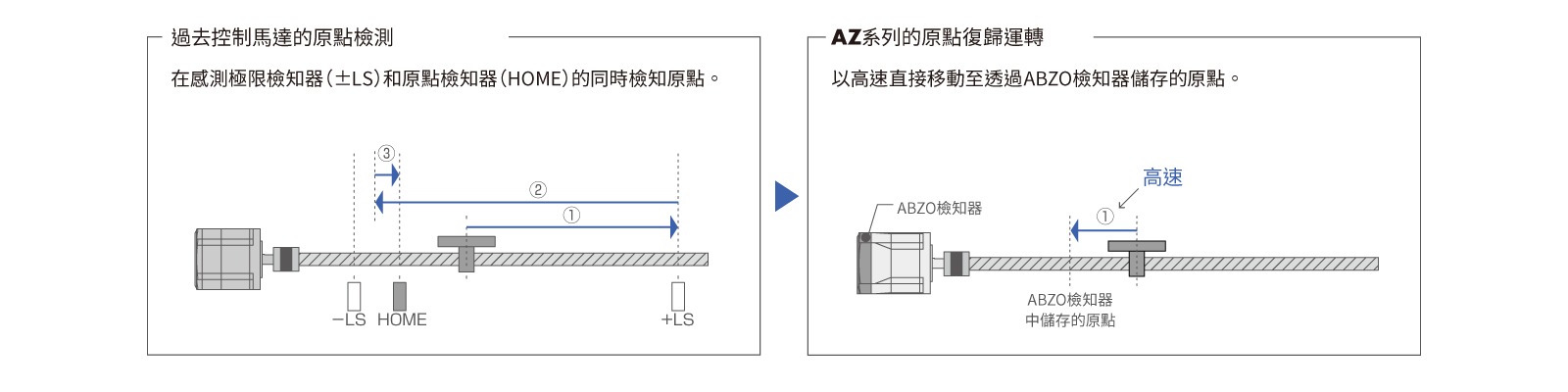
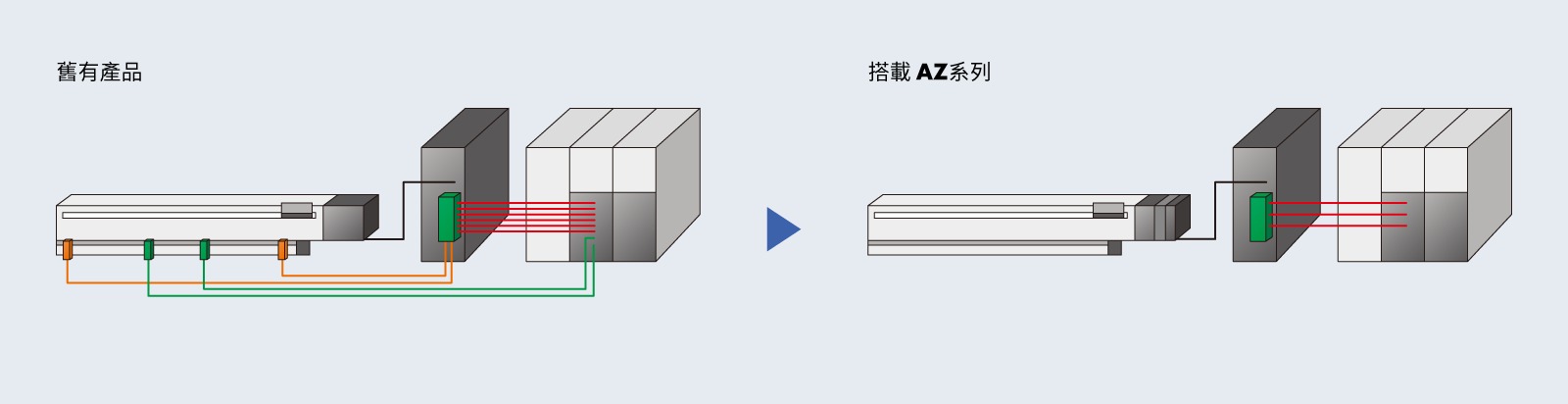
▎無需外部檢知器
由於為絕對式系統,不需要原點檢知器、極限檢知器等外部檢知器。
█ 高速原點復歸+原點復歸精度提升
沒有原點檢知器、極限檢知器也能原點復歸。無須在意檢知器靈敏度,可實現高速原點復歸並縮短生產週期。同時,不會因為檢知器靈敏度造成原點位置不一。可提升原點的精度。
█ 降低成本
不須花費外部檢知器及配線相關費用。可減低整體系統的成本。
█ 提高設備的設計自由度
可節省設置外部檢知器或配線所需空間。提高設備設計的彈性。
█ 不受到外部檢知器錯誤動作的影響
不會發生金屬加工中,因金屬片飛舞或油塵飛舞的環境下等,而發生外部檢知器錯誤動作或故障、斷線等問題。
▎無需電池
機械式檢知器無需電池。以機械方式管理位置資訊。
█ 保持位置資訊
定位運轉中阻隔電源或拆下馬達/驅動器間的電纜線,仍可保持位置資訊。
可減少原點復歸運轉的所需時間。
可減少原點復歸運轉的所需時間。
█ 減少維修作業
不需要更換電池 減少維修時間及成本。
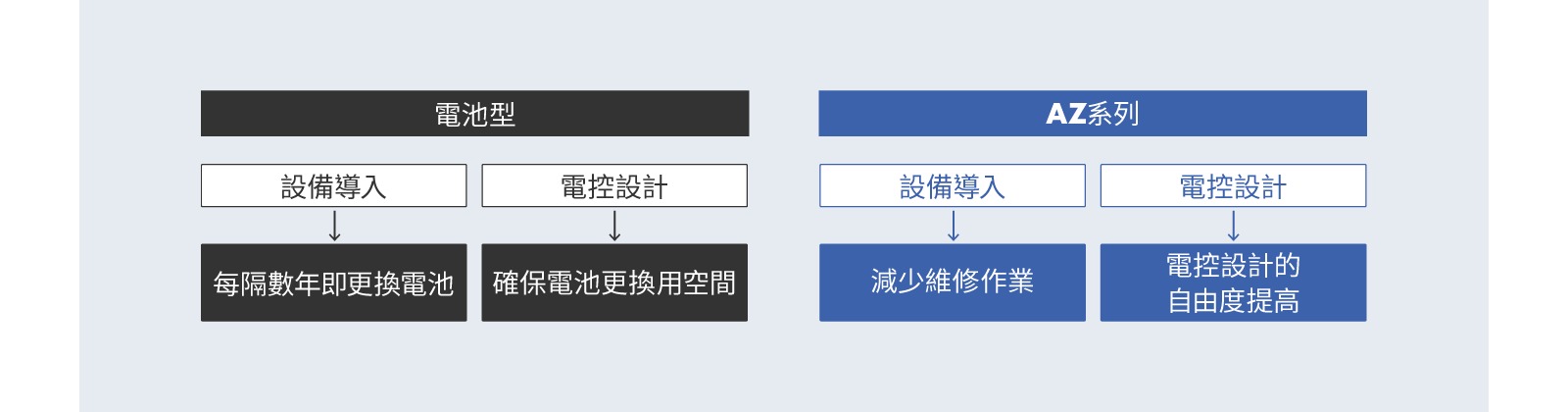
█ 提高驅動器設置的自由度
可節省設置電池或配線所需空間。驅動器安裝位置不受限制,提高電控箱等的配置設計自由度。
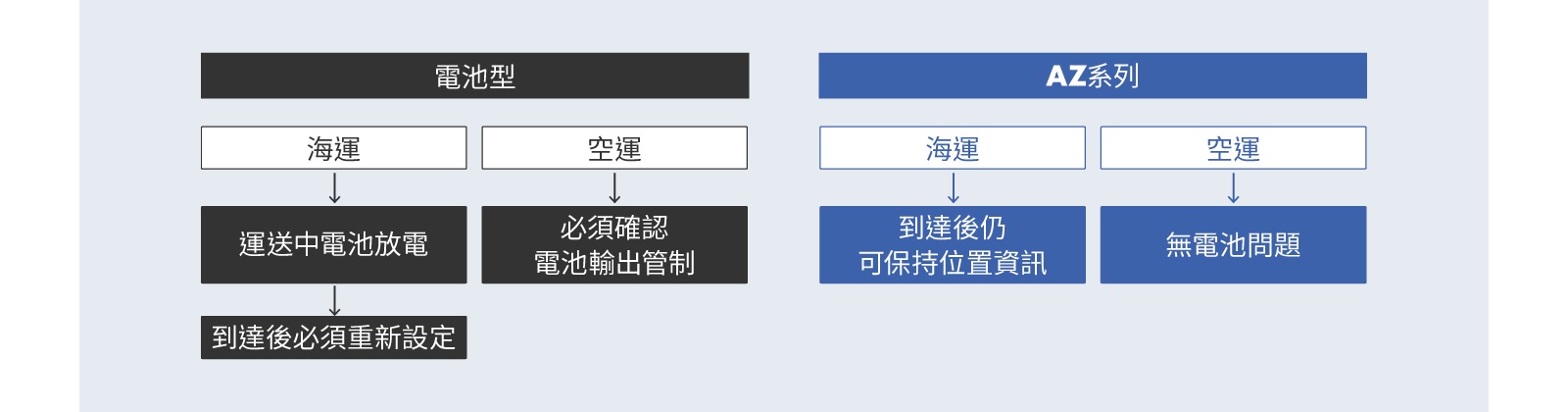
█ 海外運送也令人安心
由於電池會自行放電,因此海外出貨等長時間的搬運設備時需要特別注意。ABZO編碼器對位置資訊的保存時間沒有限制。此外,可不必考慮電池出口至海外的各種管制。
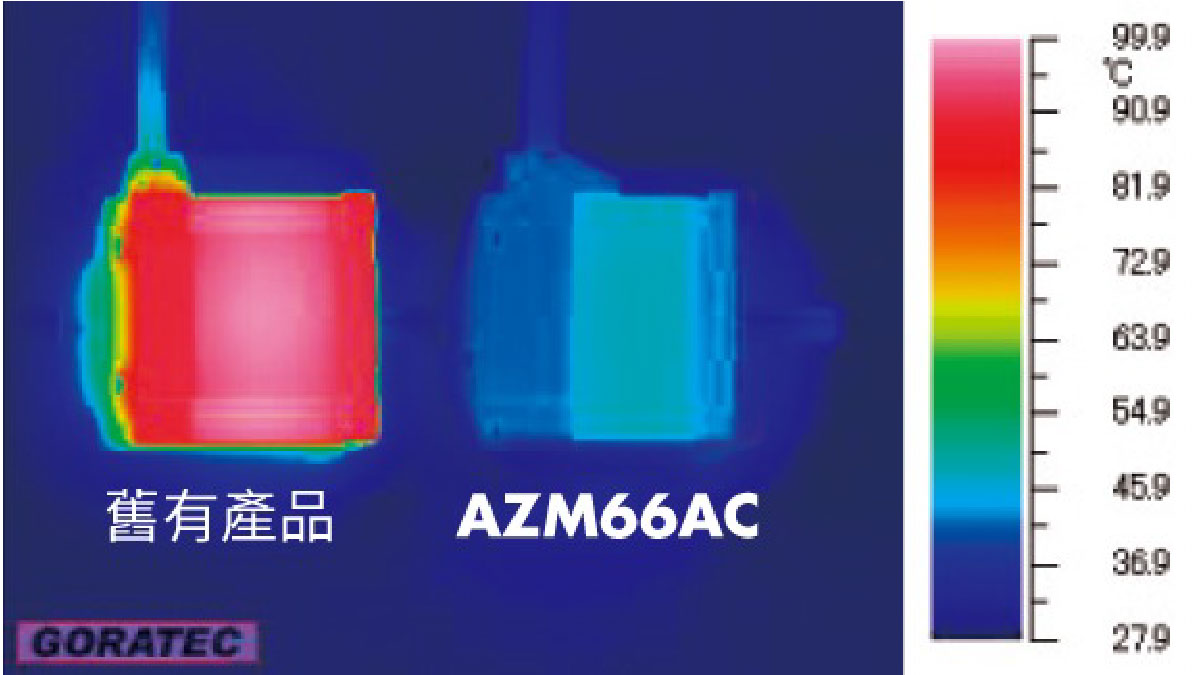
▎大幅減低發熱
|
・利用熱影像觀察溫度分布
此為在同一條件下運轉時的示意圖。 |
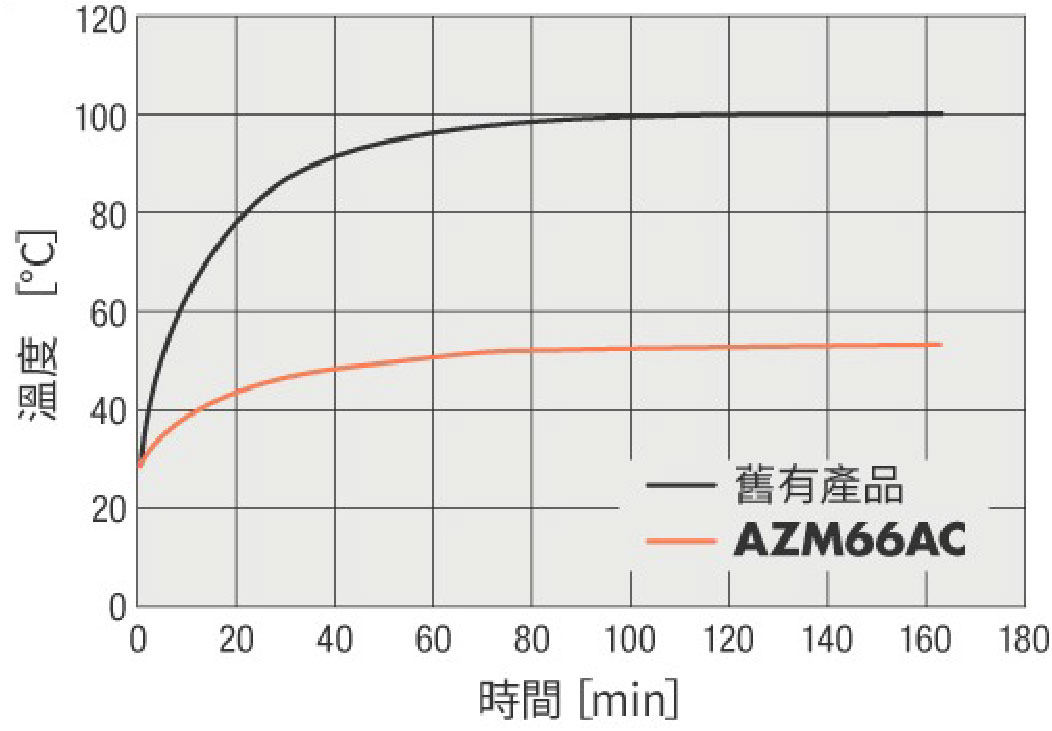
・同一條件運轉時的馬達外表溫度
|
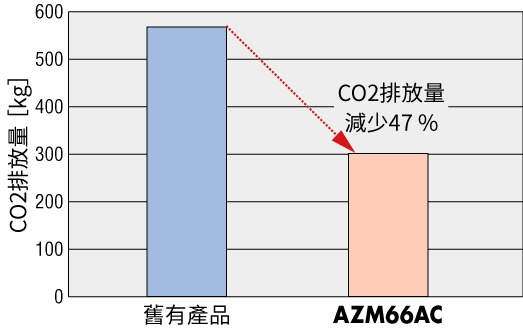
▎透過節能功能減少消耗電力
| AC電源輸入 | DC電源輸入 | |
|
消耗電力・CO2 排出量較過去減少47 %(本公司比)
|
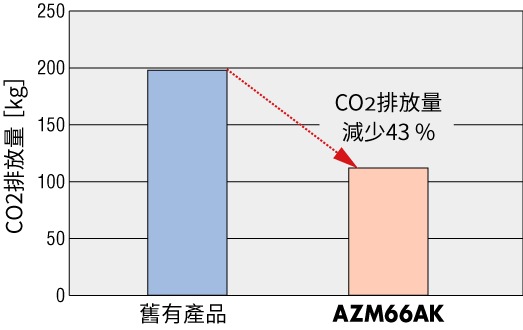
消耗電力量和 CO2 排放。 較上一水準降低43%(與東方馬達相比)
|
|
| 運轉條件 ・轉速:1000 r/min時 ・負載率:50 % ・運轉時間:24小時連續運轉時、365天 ・運轉狀態:運轉70 %、待機25 %、停止5 % ・電源電壓:單相 200-240 V ・CO 2 係數:0.519 kg-CO 2 /kWh |
運轉條件 ・轉速:1000 r/min時 ・負載率:50 % ・運行時間:24小時連續運轉時、365天 ・運轉狀態:運轉70 %、待機25 %、停止5 % ・電源電壓:DC24 V ・CO 2 係數:0.519 kg-CO 2 /kWh |
▎通常為開回路控制,過負載時改為閉回路控制
通常為開回路控制運轉,有許多優點。
當過負載時立即切換成閉回路控制,防止異常停止。
當過負載時立即切換成閉回路控制,防止異常停止。
▎開回路控制優點
█ 就算不進行增益調整,也能依照指令同步動作
有時規皮帶等剛性較低的機構時,無需增益調整也能依照指令執行。
█ 就算負載條件變動,也能依照指令同步動作
即使是凸輪等負載變動較大的機構,也無需調整即可跟隨指令。
█ 無微振
它也可以安全地用於馬達靜止時輕微振動可能會出現問題的應用。
▎閉回路控制優點
在過載的情況下,控制馬達以轉矩最大化。以避免因為轉矩不足而導致馬達停止等問題。
▎充實的監視功能
由於馬達搭載了檢知器,因此可以隨時監控位置和速度資訊。
也有方便監控運轉狀態的「定位完成信號」等。
也有方便監控運轉狀態的「定位完成信號」等。
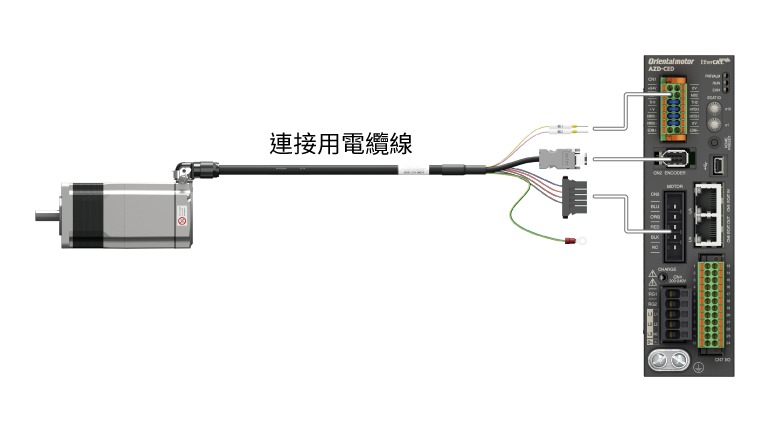
▎馬達備有2種連接方式
| 電纜線型 多條電纜線的中繼和連接 |
連接器型 使用1條電纜線能直接連接驅動器 |
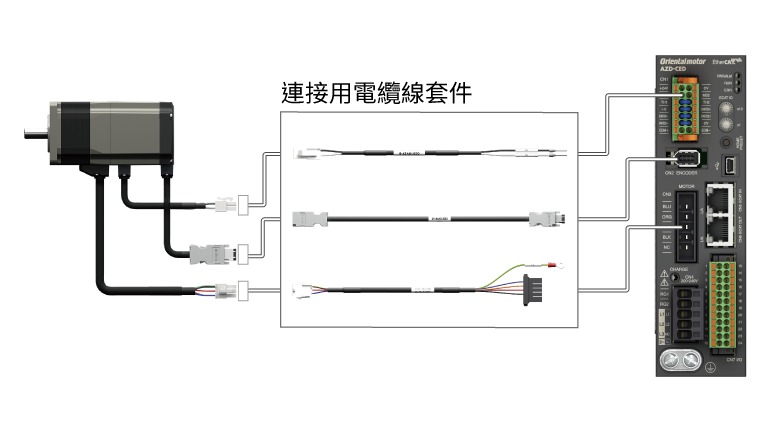 |
1 個(馬達、編碼器、電磁煞車器用)
|
▎馬達・減速機型的種類與特徵
擁有高轉矩、高解析度,以及能驅動大慣性負載等各種優點。
| 系列 | 特徵 | 安裝尺寸 mm |
齒隙 【arcmin】 |
解析度 (1000 P/R設定時) [°/脈衝] |
|
TS減速機
|
・平齒輪機構 ・無齒隙 |
42 ~ 90 | 10 ~ 45 | 0.012 ~ 0.1 |
|
直交軸 FC減速機
|
・面齒輪機構 ・無齒隙 ・節省空間 |
35 , 42 , 60 | 10 ~ 40 | 0.012 ~ 0.05 |
|
PS減速機
|
・行星式齒輪機構 ・無齒隙 ・轉矩大 |
28 ~ 90 | 7 ~ 35 | 0.0072 ~ 0.072 |
|
HPG減速機
|
・Harmonic Planetary® ・無齒隙 ・高轉矩、高精度 |
40 ~ 90 | 3 | 0.024 ~ 0.072 |
|
諧和式減速機
|
・Harmonic Drive ・無齒隙 ・高轉矩、高精度 |
30 ~ 90 | 0 | 0.0036 ~ 0.0072 |





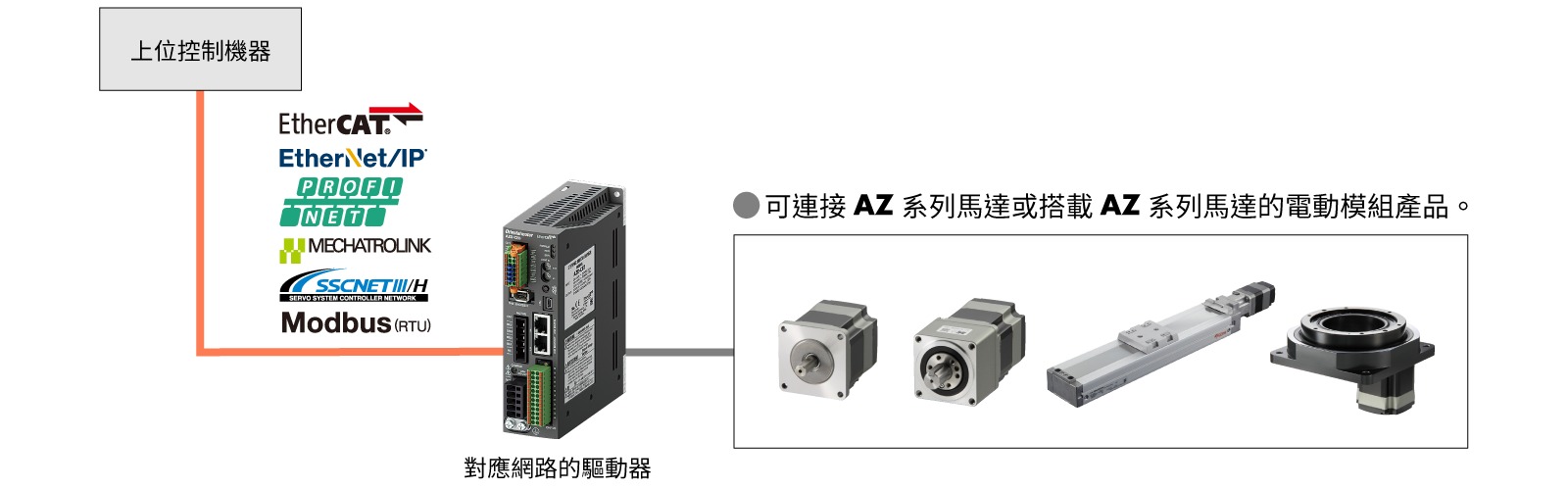
▎網路對應的驅動器
相容於全球使用的所有主要工業網絡,有助於設備資訊的集中管理和減少佈線。AC電源輸入的驅動器在轉矩方面優於DC電源輸入,而DC電源輸入的驅動器則比AC電源輸入的更小型。查找目的和應用。
|
AC電源輸入 |
DC電源輸入 |
 |


 |
 |
 |
| EtherCAT對應 | EtherNet/IP對應 | PROFINET對應 |
| AC電源輸入 DC電源輸入 |
AC電源輸入 DC電源輸入 |
AC電源輸入 DC電源輸入 |
 |
 |
 |
| MECHATROLINK-Ⅲ對應 | SSCNETIII/H對應 | 內藏定位功能型 |
| AC電源輸入 | AC電源輸入 | AC電源輸入 DC電源輸入 |
*內藏定位功能型,和另售的網路轉換器(閘道器)一起使用時,可透過CC-Link控制。
▎mini驅動器(僅限DC電源輸入)
與單軸驅動器相比,體積更小、重量更輕的mini驅動器。可設置於狹窄空間。由於電壓規格較寬,可以使用電池供電,因此也適合併入自走式設備中。
▎多軸驅動器(僅限DC電源輸入)
一台驅動器可控制複數軸(最多4軸),多軸驅動器。1台驅動器即可集中連接上位網路及電源,有助於節省配線及降低成本。
▎內藏定位功能型
● 將「位置」與「速度」等運轉資料設定在驅動器中,從I/O組合等選擇並執行運轉資料。最多可設定256筆運轉資料。
● 可透過I/O、Modbus(RTU)、網路轉換器(Gateway)任一方法控制。和另售的網路轉換器一起使用時,可透過CC-Link、EtherCAT、MECHATROLINK控制。
● 可透過I/O、Modbus(RTU)、網路轉換器(Gateway)任一方法控制。和另售的網路轉換器一起使用時,可透過CC-Link、EtherCAT、MECHATROLINK控制。

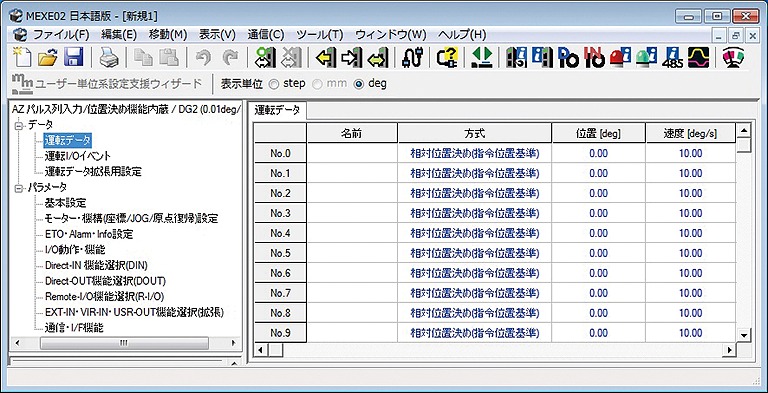
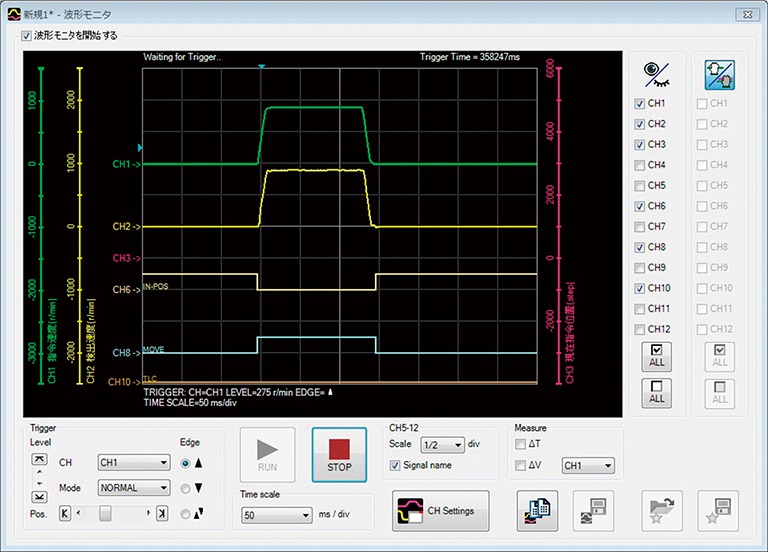
▎使用支援軟體 MEXE02從電腦簡單驅動
透過使用支援軟體 MEXE02,除了可進行運轉資料或各種參數設定、編輯之外,還可示教、監視各種狀態。
█ 透過各種功能,從起動到維修全面支援
| 起動、評估 | ▶ | 調整 | ▶ | 診斷、維修 |
| 備有可助於配線檢查或測試運轉的功能。 | 安裝設備後,有助於馬達動作調整的功能。 | 備有開始運用後有助於發生問題時進行診斷或維修功能。 | ||
| ・運轉資料的設定及儲存 ・I/O監視 ・示教・遙控運轉 |
・波形監視 | ・Alarm監視 ・組合資訊監視 ・狀態監視 |
|
運轉資料/參數設定畫面 |
波形監視 |
AZ αSTEP閉回路步進馬達形象影片
AZ - 7軸自組手臂配合輕量型驅動器應用例
延伸閱讀
➤ 步進馬達也可以進行閉回路控制嗎?
➤ 自動化機構設計該如何選配零組件?定位模組新提案!
➤ 全方位精密滑台提案,設計需求一次滿足!
➤ 工業4.0改革 – 設備不停機的「預知保全」觀念
➤ 廣億組裝服務上線中,高精密滑台組合新選擇!
➤ 實現細緻的「抓取」動作
應用案例
| 機種 | 安裝尺寸 | 激磁最大靜止轉矩 | 齒隙 | 解析度 | 電磁剎車 | ||
| [mm] | [N‧m] | [arcmin] | (1000P/R設定時) | 有 | 無 | ||
| [°/脈波] | |||||||
| 標準 | 42 | 0.3 | - | 0.36 | ○ | - | |
| 60 | 1.2 ~ 2 | ○ | - | ||||
| 85 | 2 ~ 4 | ○ | - | ||||
| 低 齒 隙 |
TS減速機 | 42 | 0.65 ~ 2.3 | 15 ~ 45 | 0.012 ~ 0.1 | ○ | - |
| 60 | 1.8 ~ 6 | 10 ~ 35 | ○ | - | |||
| 90 | 6 ~ 25 | 10 ~ 25 | ○ | - | |||
| PS減速機 | 42 | 1 ~ 3 | 15 | 0.0072 ~ 0.072 | ○ | - | |
| 60 | 3.5 ~ 8 | 7 ~ 9 | ○ | - | |||
| 90 | 10 ~ 37 | ○ | - | ||||
| 無 齒 隙 |
HPG減速機 | 40 | 1.5 ~ 2.5 | 3 | 0.04 ~ 0.072 | ○ | - |
| 60 | 5.9 ~ 9 | ○ | - | ||||
| 90 | 10 ~ 24 | 0.024 ~ 0.072 | ○ | - | |||
| 諧和式減速機 | 42 | 3.5 ~ 5 | 0 | 0.0036 ~ 0.0072 | ○ | - | |
| 60 | 7 ~ 10 | ○ | - | ||||
| 90 | 33 ~ 52 | ○ | - | ||||
| 直交軸 FC減速機型 |
42 | 0.7 ~ 3 | 10 | 0.012 ~ 0.05 | ○ | - | |
| 60 | 2.5 ~ 10.5 | ○ | - | ||||
| 機種 |
安裝 |
激磁最大靜止轉矩 [N‧m] |
齒隙 [arcmin] |
解析度 (1000P/R設定時) [°/脈波] |
電磁 剎車 |
||
| 有 | 無 | ||||||
| 標準 | 20 | 0.02 ~ 0.036 | - | 0.36 | ○ | ○ | |
| 28 | 0.095 ~ 0.19 | ○ | ○ | ||||
| 42 | 0.3 | ○ | ○ | ||||
| 60 | 1.2 ~ 2 | ○ | ○ | ||||
| 低齒隙 | TS減速機 | 42 | 0.65 ~ 2.3 | 15 ~ 45 | 0.012 ~ 0.1 | ○ | ○ |
| 60 | 1.8 ~ 6 | 10 ~ 35 | ○ | ○ | |||
| PS減速機 | 42 | 1 ~ 3 | 15 | 0.0072 ~ 0.072 | ○ | ○ | |
| 60 | 3.5 ~ 8 | 7 ~ 9 | ○ | ○ | |||
| 無齒隙 | HPG減速機 | 40 | 1.5 ~ 2.5 | 3 | 0.04 ~ 0.072 | ○ | ○ |
| 60 | 5.9 ~ 9 | ○ | ○ | ||||
| 諧和式減速機 | 42 | 3.5 ~ 5 | 0 | 0.0036 ~ 0.0072 | ○ | ○ | |
| 60 | 7 ~ 10 | ○ | ○ | ||||
| 直交軸 | 42 | 0.7 ~ 3 | 10 | 0.012 ~ 0.05 | ○ | - | |
| FC減速機型 | 60 | 2.5 ~ 10.5 | ○ | - | |||
如需產品圖檔,請洽廣億科技服務人員,謝謝!