

東方馬達
Oriental motor
BLV R型 無刷馬達
BLV R型 系列
實現更進一步體積縮小、重量變輕的DC電源輸入無刷馬達。
可設定自1r/min起的低速運轉,實現順暢的驅動。
對應電池驅動,支援更輕巧的機器開發。
對應Modbus(RTU)、CANopen通訊。
▎2分鐘立即了解 BLV系列 R型
|
|
BLV系列 R型的特徵可觀賞以下影片。
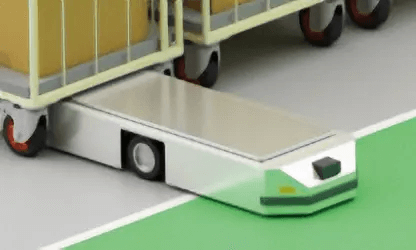
▎用途例
| █ 附輸送帶的自主搬運機器人 | █ 低底盤搬運機器人 |
 |
 |
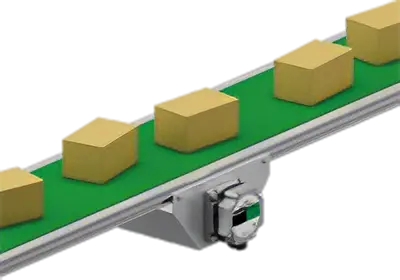
| █ 攪拌機 | █ 輸送帶 | █ 監視攝影機的電動雲台 |
 |
 |
 |
▎小型、輕量
馬達與驅動器皆大幅縮小體積、減輕重量。
█ 馬達部*
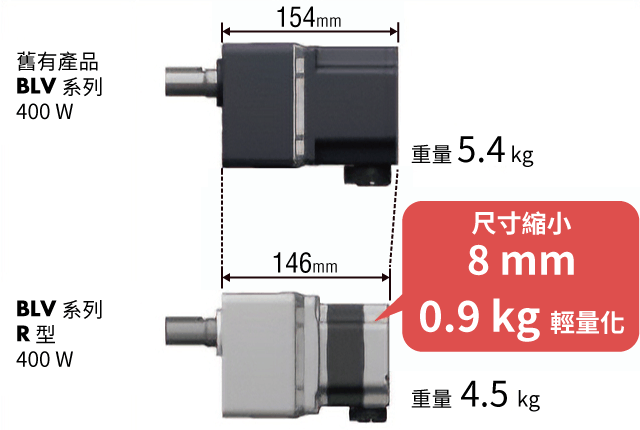
*平行軸減速機400 W減速比 30
█ 驅動器
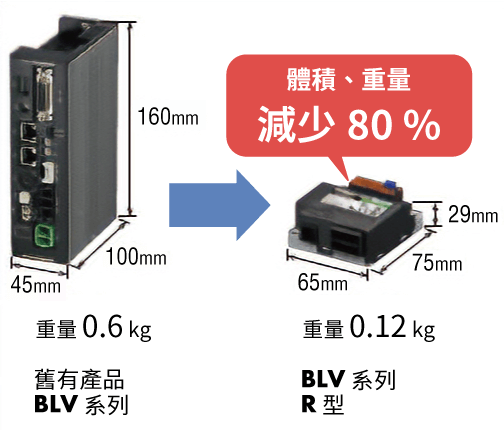
DC24 V 400 W 的尺寸為 160(W) mm x 110(D) mm x 35(H) mm,重量為 0.46 kg。
▎高效率
能夠驅動比傳統產品更大的負載慣量,從而實現重負載的運輸。
【搬運機器人設備設計實例】
條件
| BLV系列 R型 馬達部 |
種類 | 平行軸減速機 |  |
|
|---|---|---|---|---|
| 輸出 | 400 W時 | |||
| 減速比 | 30 | |||
| 行駛條件 | 輪徑 | 150 mm | ||
| 驅動輪數量 | 2 | |||
| 加速時間 | 1秒 |
| ▼ |
|---|
結果
| 最大可搬重量 (搬運機器人本體質量+負載質量) |
500 kg | |||
|---|---|---|---|---|
| 最大轉速 | 0.7 m/sec | |||
*車輪的摩擦係數以0.1計算。
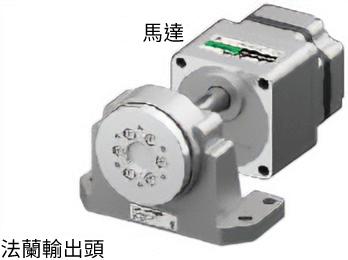
█ 許可負載大幅提升,-法蘭輸出頭(另售)-
| 安裝在平行軸齒輪箱上會增加允許的徑向和軸向負荷。 由於容易安裝於車輪或旋轉平台等旋轉機構上,有助於縮短設計時間。 *可用於馬達輸出100 W的平行軸減速機 |
 |
▎寬廣的速度控制範圍1~4000 r/min
| 1 r/min 的低速範圍可提供穩定的運行,實現更平穩的起動和停止。 | 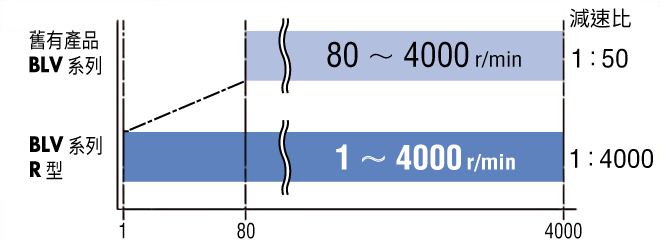 |
優點
- 即使如追上人體動作般,重複起動及停止動作,也能流暢地運行
▎依照設定速度作動的高速度安定性
| 速度變動率(對負載*1)小,僅為±0.01% 當負載大幅變化,也能以設定的速度運轉。 | 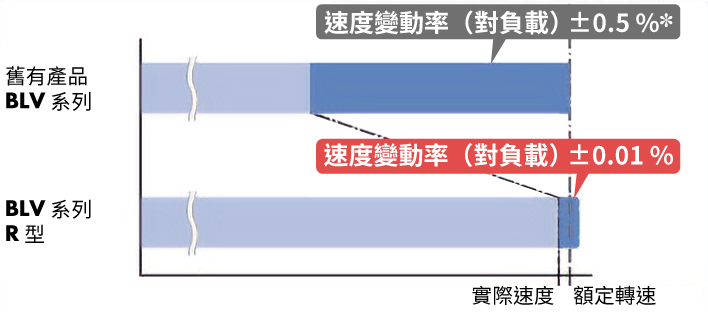 *數位設定時為±0.2 % |
▎可取得現在位置及定位運轉
| 由於馬達的回授資訊豐富,因此可以取得現在位置。 此外,由於解析度提高,可精準停止在目標位置上。 |
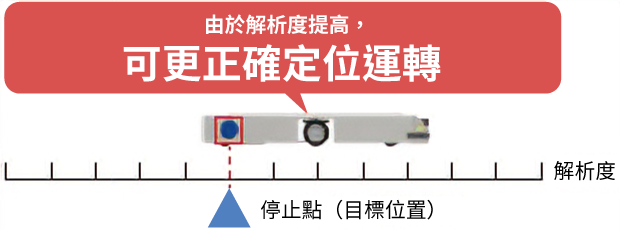 |
- 定位運轉時的停止精度於馬達軸上為±0.72°,於減速機出力軸上則為1~2°左右。
▎放大可動作電壓範圍
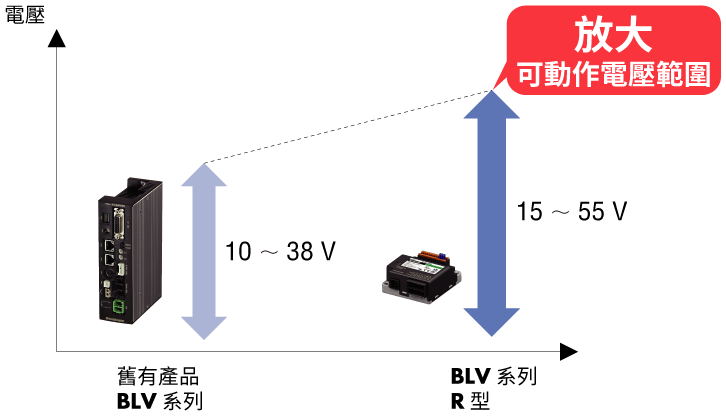 |
優點
|
▎消耗電力減少10 %
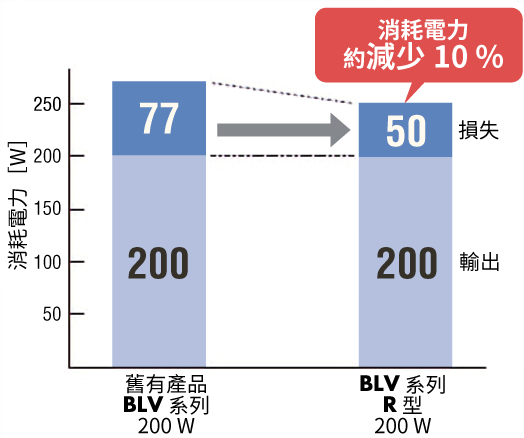 |
優點
|
 |
▎透過電氣剎車可在停止時保持位置
當馬達停止時,透過激磁馬達產生保持力(伺服ON)。
即使馬達沒有電磁剎車,依舊能當作電氣保持剎車使用。
此外,它還具有保持位置的功能,使其不會從停止位置移動。
即使馬達沒有電磁剎車,依舊能當作電氣保持剎車使用。
此外,它還具有保持位置的功能,使其不會從停止位置移動。
▎自動限制輸出轉矩的ATL功能
即使馬達進入過負載狀態,它也配備了ATL功能,可降低輸出轉矩並繼續運行,以避免因過負載Alarm而停止。
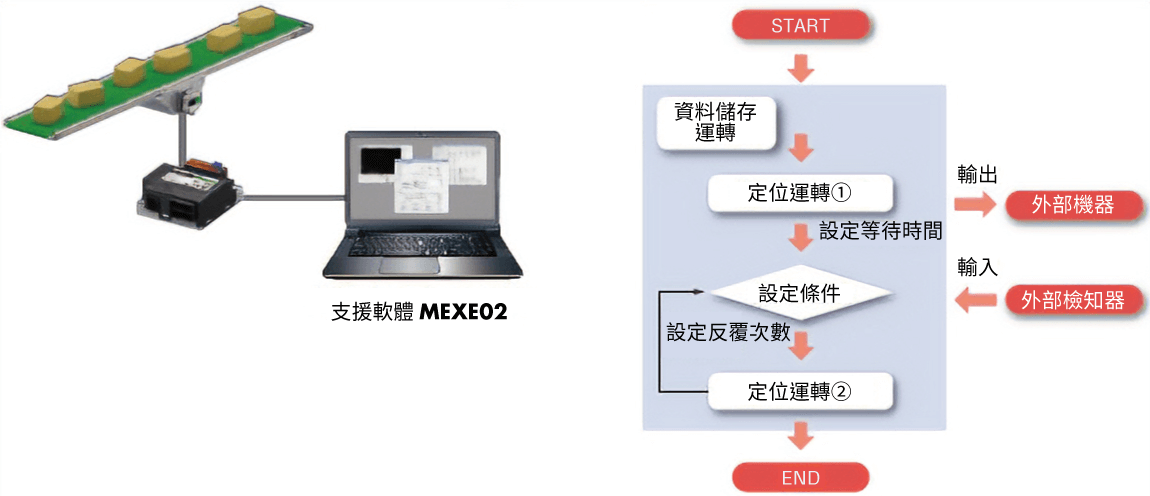
▎透過編程功能簡化主程式
搭載了連結運轉、運轉時間設定、條件分歧及Loop次數等多種編程功能,可用於資料儲存運轉。可將上位系統程序程式簡化。
- 資料儲存設定數(最大256點)
- 直接輸出入點數(輸入4點、輸出2點)
- 遠端輸出入點數(輸入32點、輸出32點)
BLV系列 R型對應2種通訊介面。Modbus (RTU) 和 CANopen。

▎使用Modbus(RTU)可達成的主要功能
█ 可自由製作運轉Profile:直接資料運轉
透過Modbus(RTU)通訊,可同時進行資料重寫及開始運轉的運轉方法。
| 運轉資料種類 | 內容 |
|---|---|
| 運轉方式 | 設定運轉方式。 |
| 位置 | 設定目標位置。 |
| 轉速 | 設定運轉速度。 |
| 加速斜率 | 設定加速時間。 |
| 減速斜率 | 設定減速時間。 |
| 轉矩限制值 | 設定轉矩限制值。 |
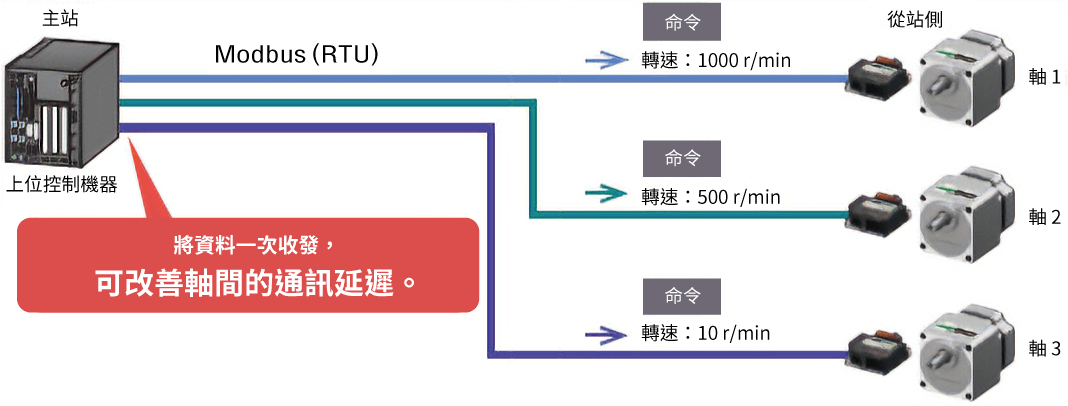
█ 可同時對各軸收發不同資料:ID共享模式
透過Modbus(RTU)通訊,提高軸間同步性的功能。
可同時接收複數軸的資料,改善軸之間的通訊延遲。
也可對各軸同時傳送不同指令。
此為本公司獨創的傳送方式。
可同時接收複數軸的資料,改善軸之間的通訊延遲。
也可對各軸同時傳送不同指令。
此為本公司獨創的傳送方式。
使用資料設定軟體MEXE02即可在電腦上簡單完成資料設定及實際驅動透過各種監視進行確認。
支援軟體可至本公司網站下載。
支援軟體可至本公司網站下載。
▎起動 有助於順暢起動設備的功能
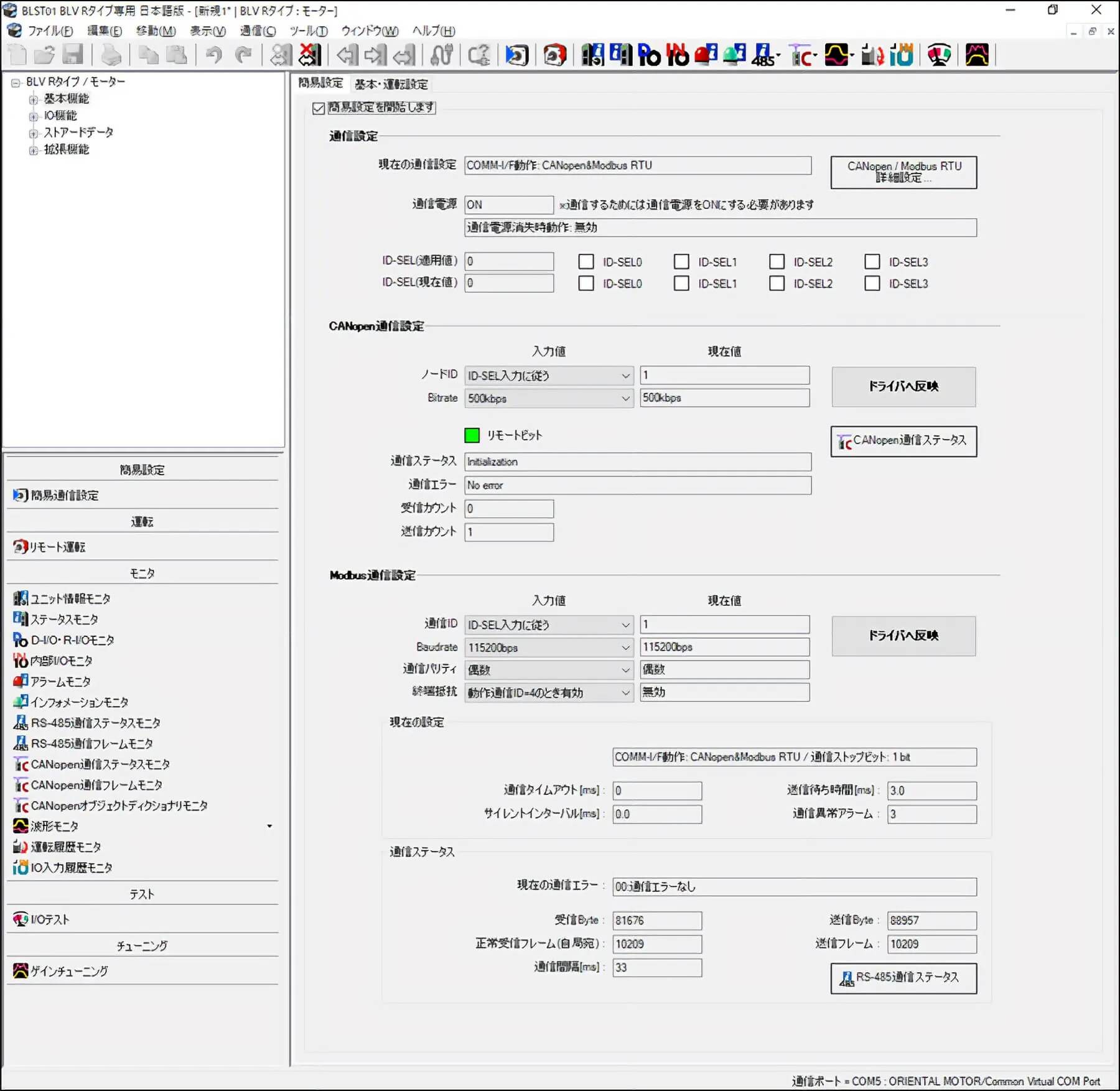
█ 設定簡單
運用「簡易通訊設定」,可輕鬆設定各個通訊。
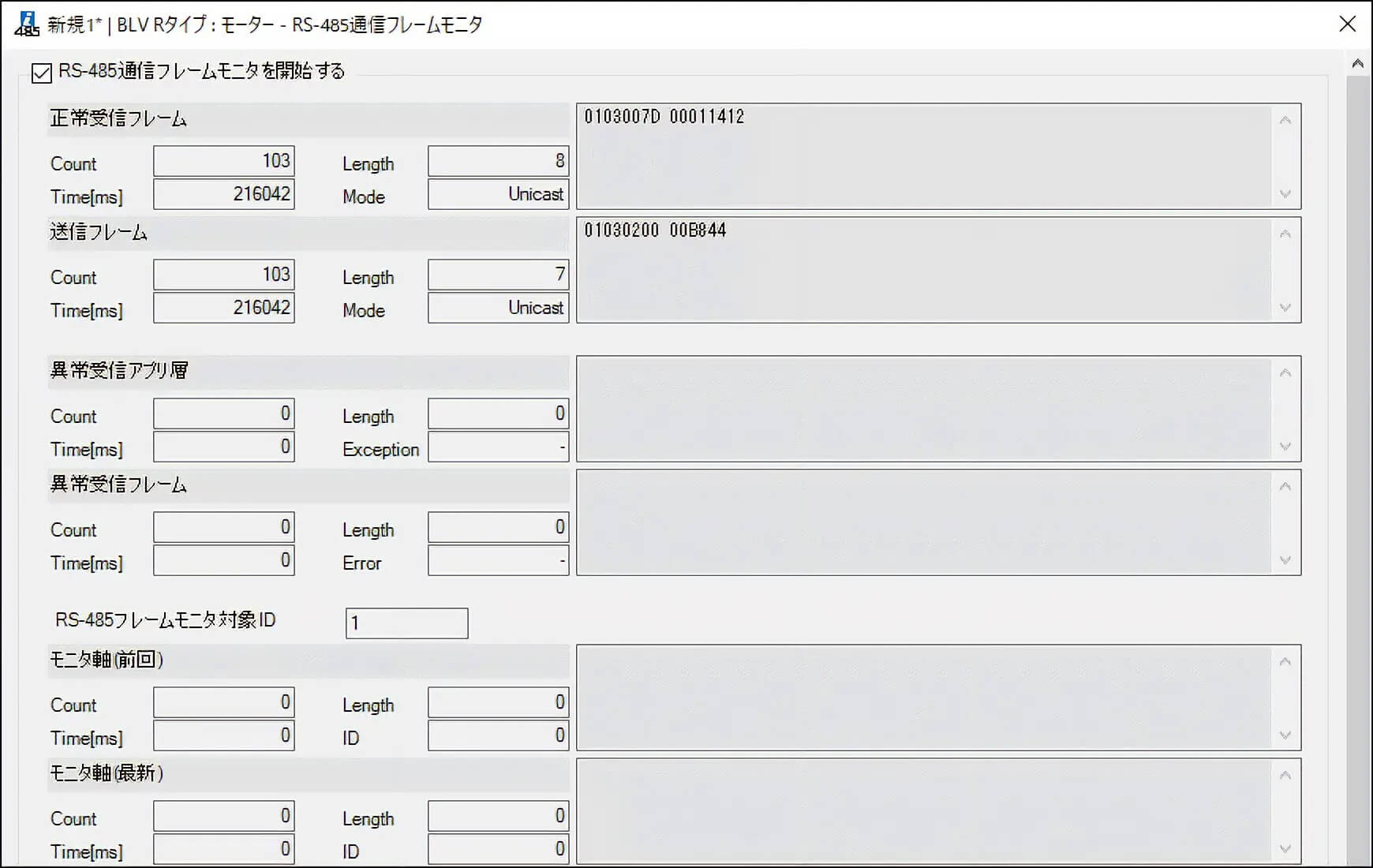
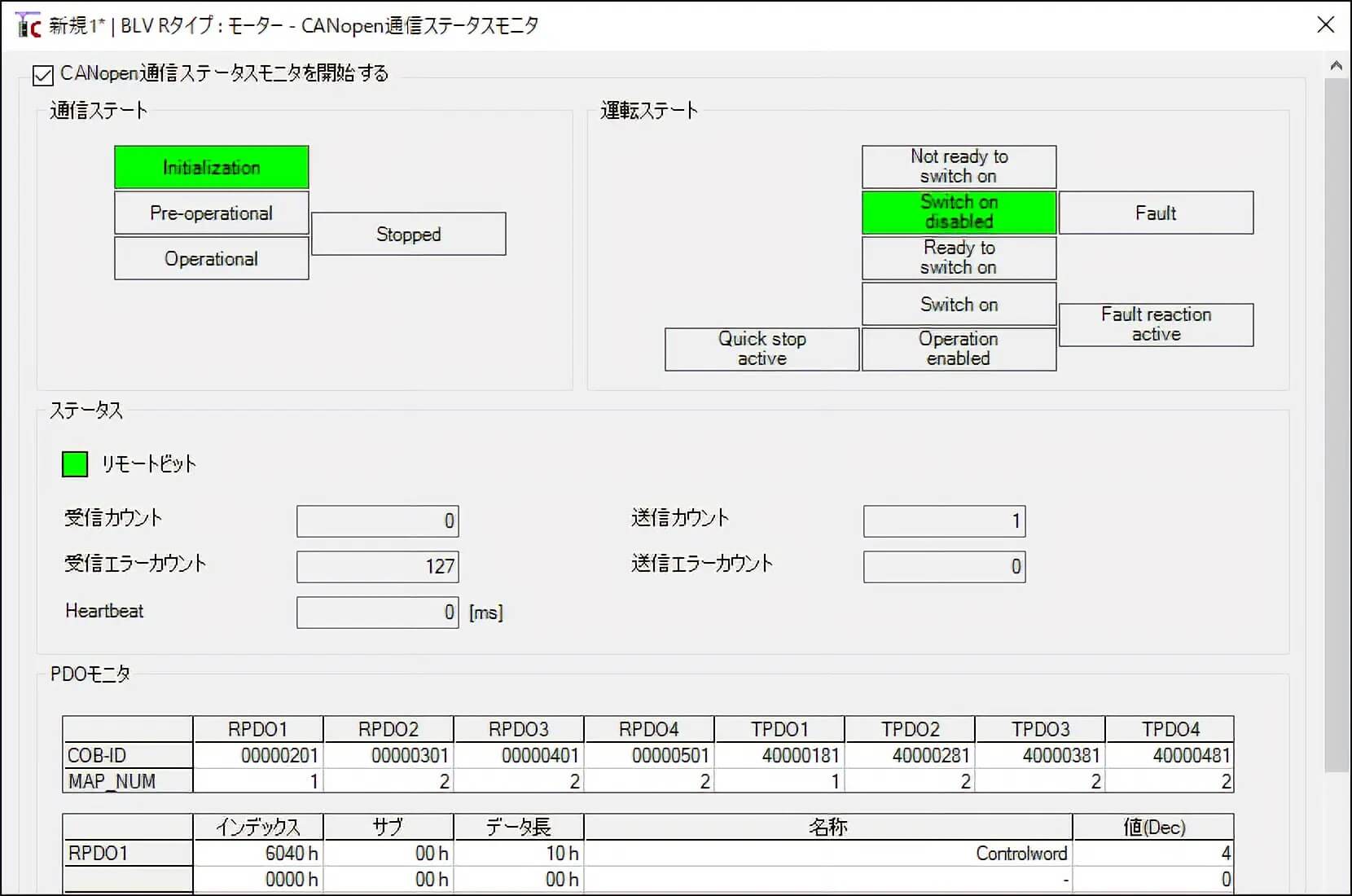
█ 通訊幀監控與通訊狀態監控
可監視各通訊的訊框及狀態。
可用於起動上位程式或除錯作業。
可用於起動上位程式或除錯作業。
▎運轉 有助於調整的功能
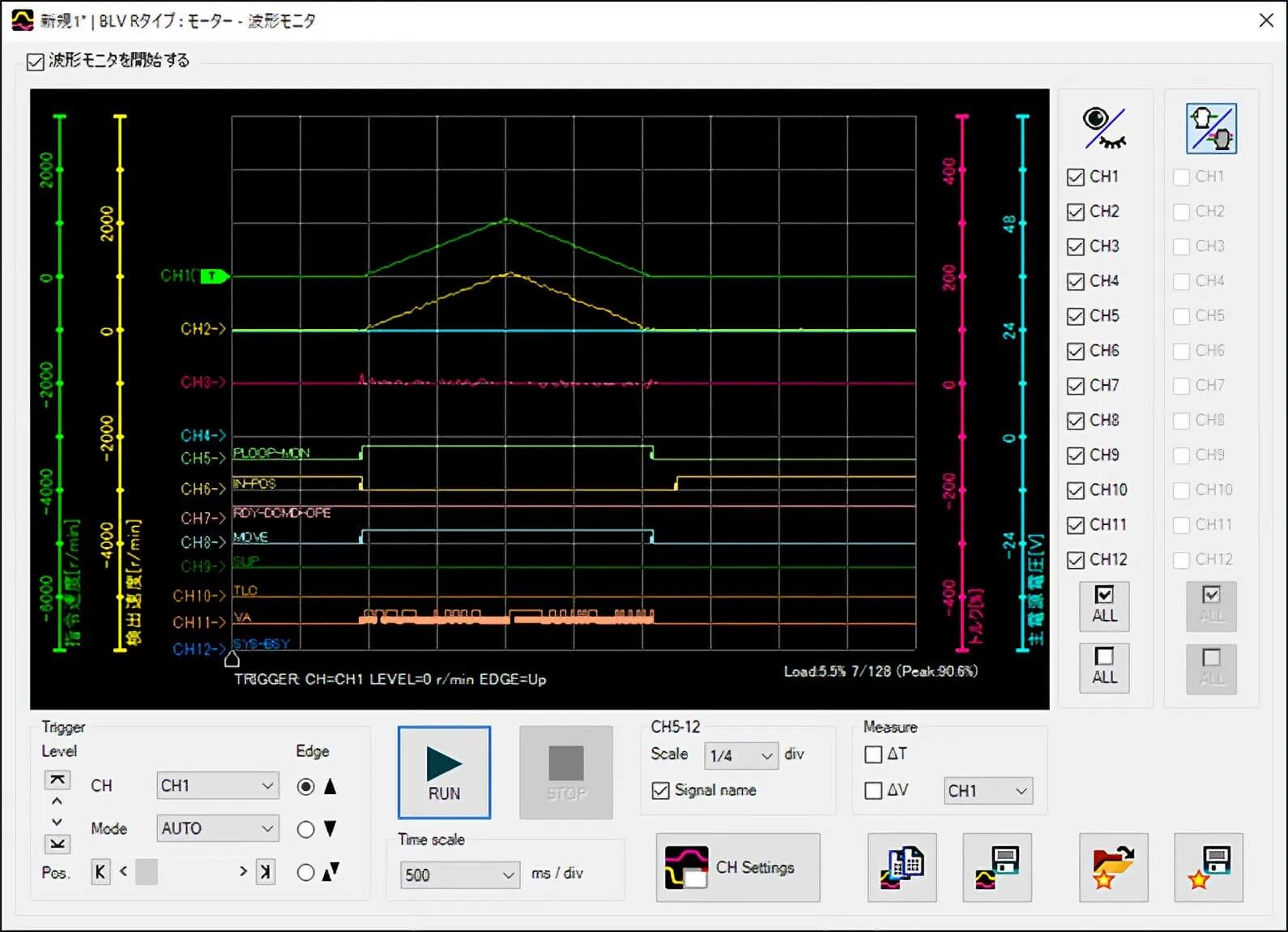
█ 波形監視
如示波器般可確認馬達的運轉狀態(指令速度、轉矩、輸出入信號等)。
可以影像及CSV格式儲存波形的測量結果。
可以影像及CSV格式儲存波形的測量結果。
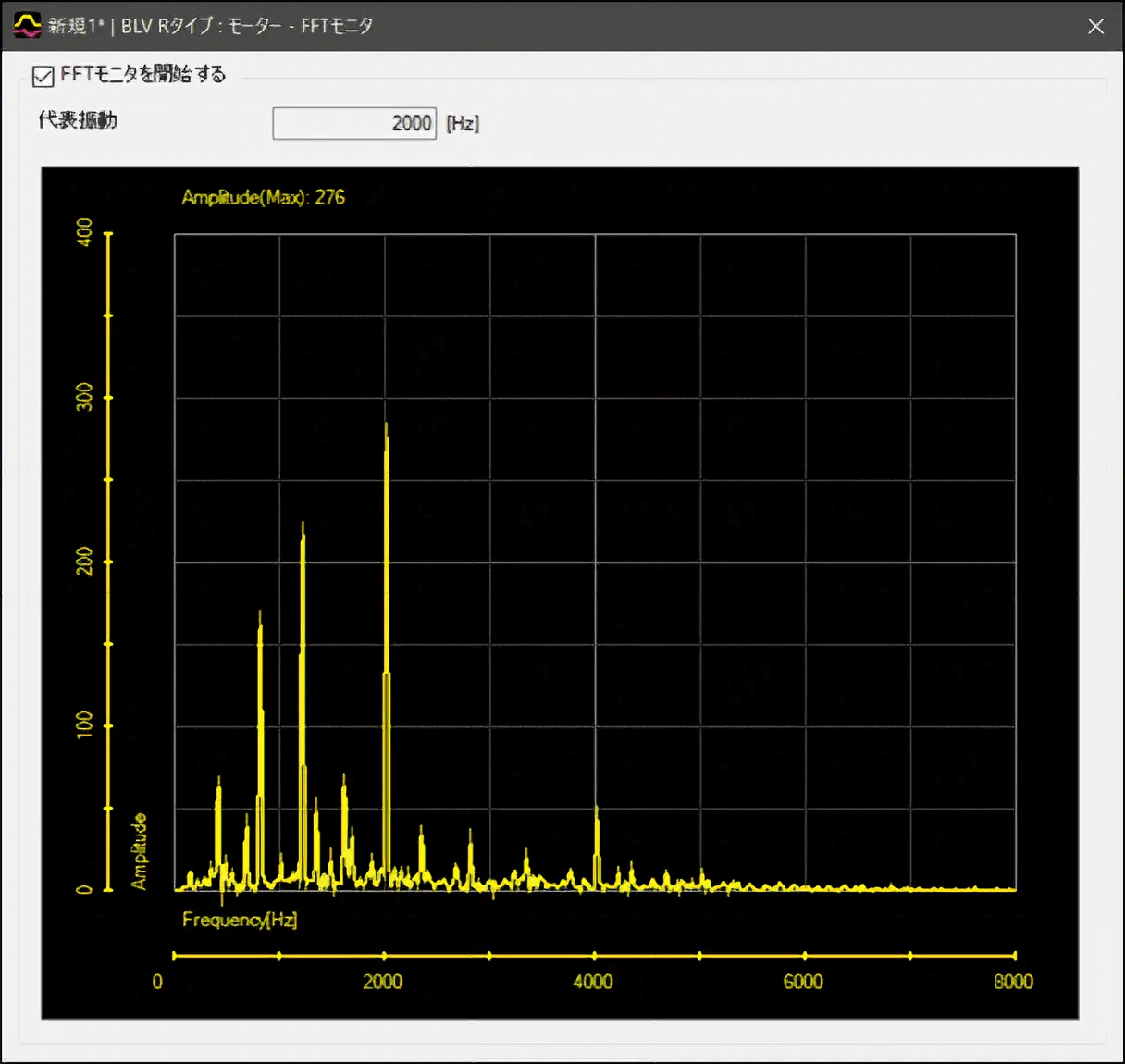
█ FFT 監視
使用FFT解析的頻率分析,使機械共振可視化。調整「抑制共振參數」,減低聲音、振動。
█ 增益調整
調整馬達對指令的追蹤性。

▎維修 有助於診斷/維修的功能
█ 追蹤監視
可連續24小時以上量測馬達的運轉狀態。
可以CSV格式保存資料。
可以CSV格式保存資料。

優點
- 由於能長時間保留資料,有利追查問題的原因。
▎各種監控功能
資料設定軟體MEXE02還可以監視其他各種資訊。
詳細內容請參閱以下頁面。
詳細內容請參閱以下頁面。
延伸閱讀
產品陣容
馬達、驅動器、連接用電纜線、電源電纜線為個別販售。也可以組合訂購。
▎馬達
| 出力軸型 | 安裝尺寸 〔mm〕 |
額定輸出 〔W〕 |
減速比 | 額定電壓 〔V〕 |
電磁剎車 |
連接用電纜線 可動連接用電纜線 |
電源電纜線 |
|---|---|---|---|---|---|---|---|
平行軸減速機 |
80 | 60 | 5~200 | DC24~48 V | 無 | ◇60 W 連接用電纜線 可動連接用電纜線 0.3*2~3 m  ◇100 W/200 W/400 W 連接用電纜線 可動連接用電纜線 1~3 m  |
電源電纜線 0.6 m  |
| 90 | 100 | 配備/未配備 | |||||
| 110 | 200 | ||||||
| 400 | |||||||
中空軸扁平式減速機 |
80 | 60 | 5~200 | 無 | |||
| 90 | 100 | 配備/未配備 | |||||
| 104 | 200 | 10~100 | |||||
| 400 | 5~100 | ||||||
CS減速機型馬達*1 |
60 | 60 | 5~20 | 無 | |||
圓軸 |
60 | 60 | - | 無 | |||
| 90 | 100 | 配備/未配備 | |||||
| 200 | |||||||
| 400 |
*1 馬達和減速機一體化的減速機型馬達。
*2 0.3 m的電纜線長度僅適用於連接用電纜線。
*2 0.3 m的電纜線長度僅適用於連接用電纜線。
▎驅動器
| 輸出〔W〕 | 電壓〔V〕 | |
|---|---|---|
| 60~200 |  |
DC24~48 V |
| 400 | 新款  |
DC24 V |
|
DC48 V | |
▎1條電纜線即可直接連接、無需中繼處理(60 W型)
可使用1條電纜線直接連接馬達與驅動器。可連接0.3 m~3 m,無需繼電器。
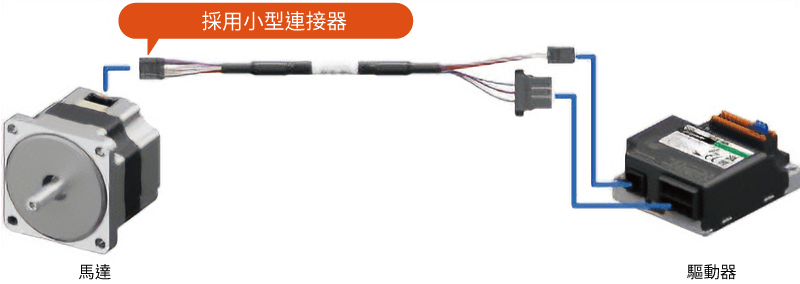 |
連接用電纜線:0.3 m~3.0 m 可動連接用電纜線:1.0 m~3.0 m |
如需產品圖檔,請洽廣億科技服務人員,謝謝!