

內容大綱 (點擊展開)
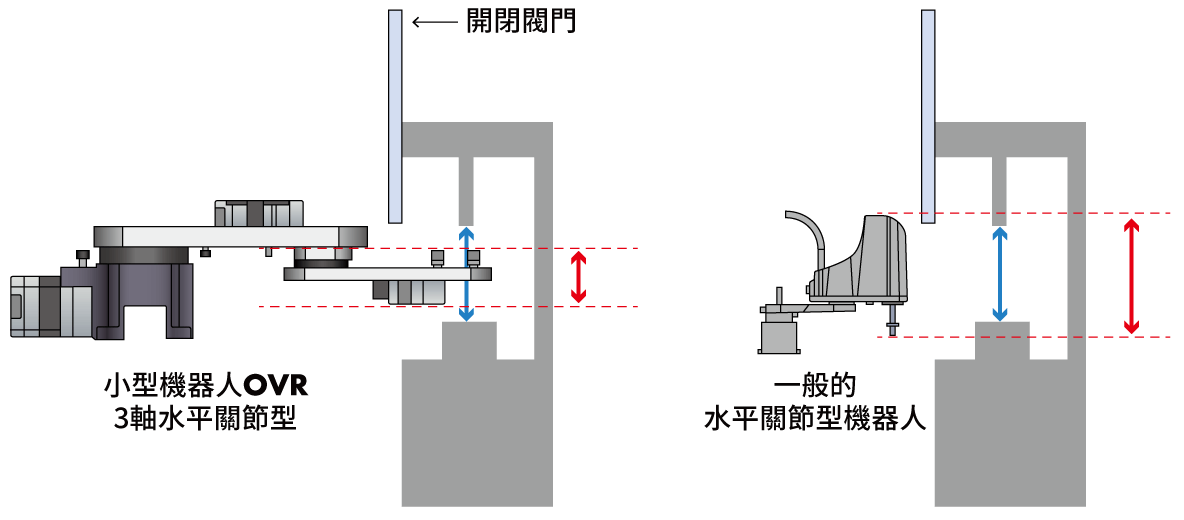
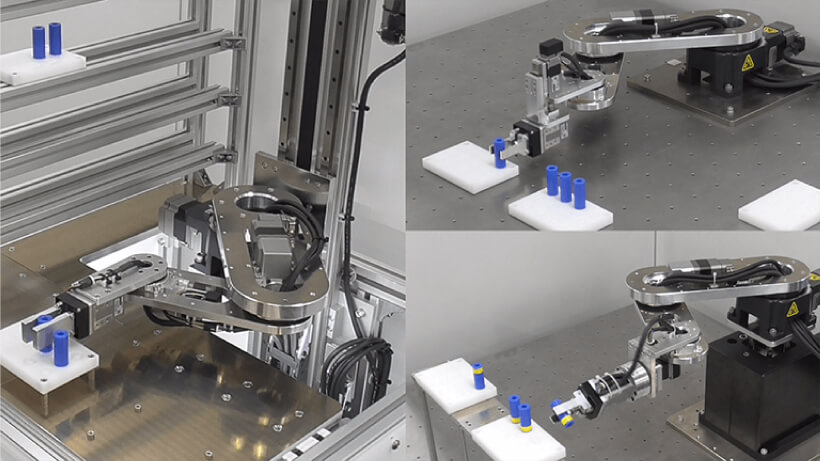
與一般的水平關節型機器人相比,薄型的設計使機器人能夠用於狹窄的空間,例如在設備上安裝和拆卸零件。
 我們提供方便的周邊機器,以便能更快速的導入機器人。 |
可以根據用途自由設計機器人。
|
 |
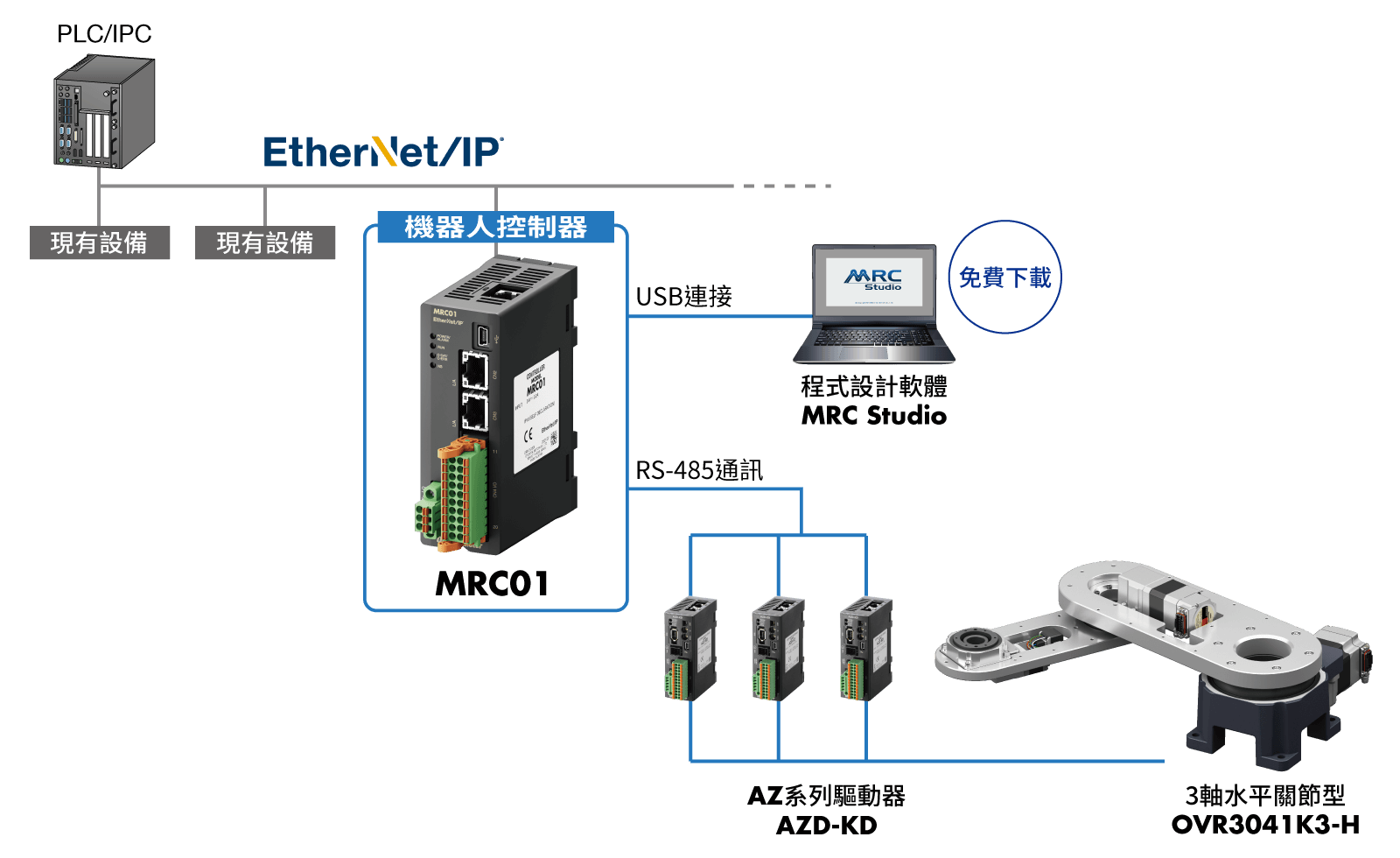
MRC01是可以控制搭載AZ系列機器人的機器人控制器。 程式設計軟體MRC Studio(免費)設定簡單,即使沒有控制機器人的相關經驗也能快速掌握。 |
 |
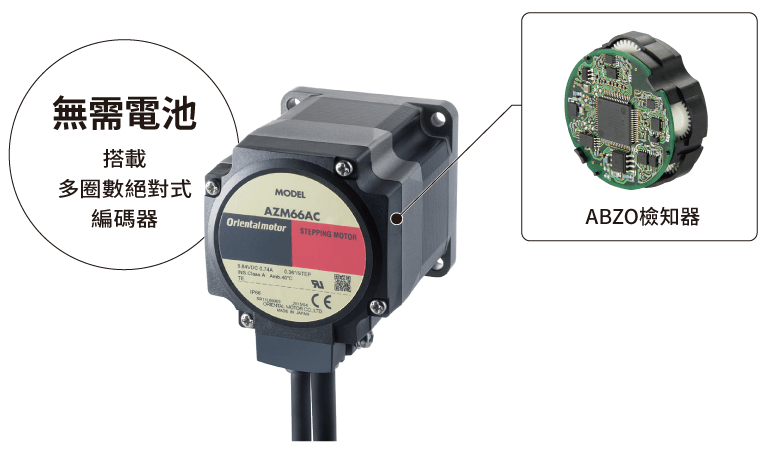 |
所有軸均使用αSTEP AZ系列(DC電源輸入)。 絕對式方式消除了外部檢知器的需要,減少了接線,因為無須電池、減少了維護管理的需要。 DC電源輸入使電源線佈線變得容易。可靈活應對線路安裝、佈局變化。 |
|
機器人、機器人控制器、驅動器和電纜必須各別訂購。
使用機器人控制器MRC01和程式設計軟體MRC Studio可以輕鬆控制機器人。
推薦可連接至MRC01的驅動器為DC電源輸入型驅動器AZD-KD或mini驅動器AZD-KR2D。
使用機器人控制器MRC01和程式設計軟體MRC Studio可以輕鬆控制機器人。
推薦可連接至MRC01的驅動器為DC電源輸入型驅動器AZD-KD或mini驅動器AZD-KR2D。
延伸閱讀
➤ 降低成本同時提高產能,任何人皆可快速上手的自製機器人
➤ 完全守備!廣億科技模組滑台滿足全精度範圍!
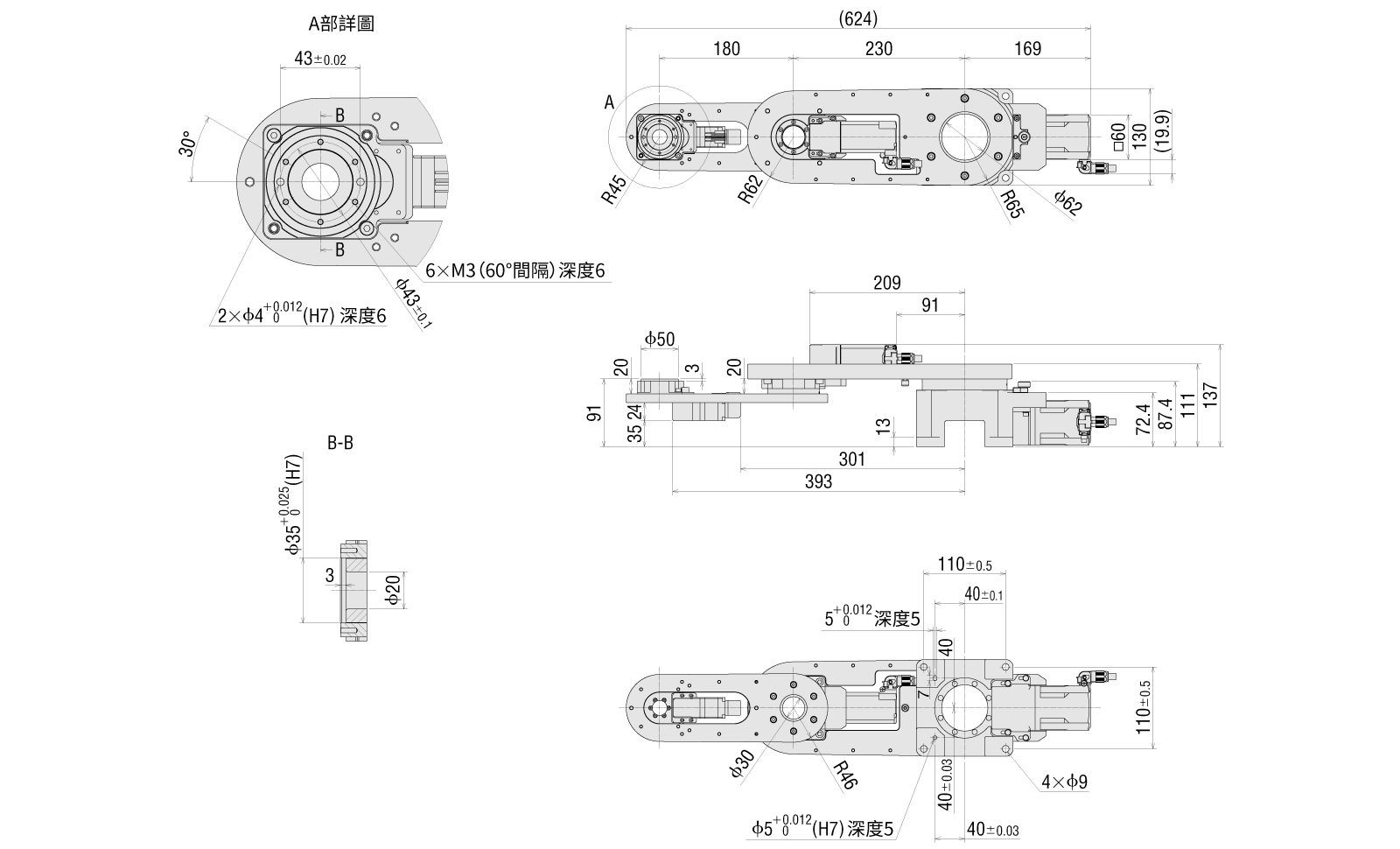
▎外形圖(單位 mm)
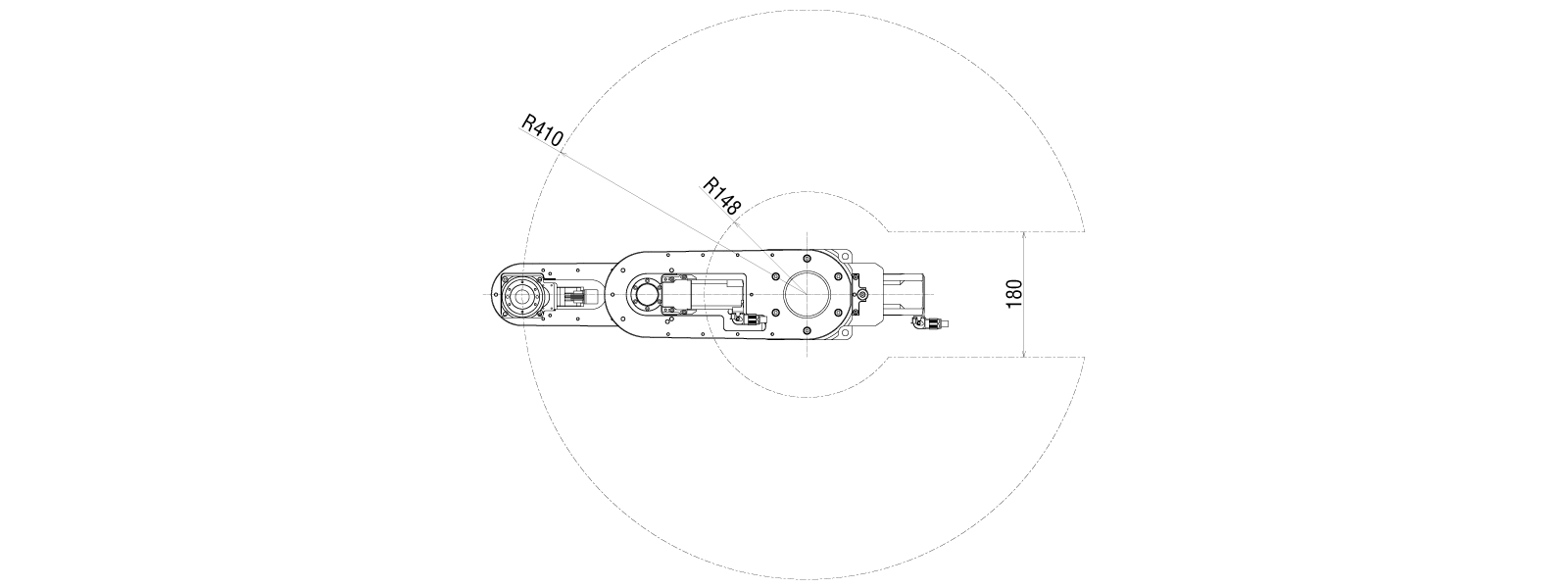
▎動作範圍圖(單位 mm)
| 品名 | OVR3041K3-H | |
| 軸數 | 3軸 | |
| 輸入電壓 | DC24V | |
| 機械手臂的長度 | 第1臂 | 230 mm |
| 第2臂 | 180 mm | |
| 可搬重量 | 3 kg | |
| 可動範圍*1 | 第1軸 | ±170度 |
| 第2軸 | ±140度 | |
| 最高速度 | 第1軸 | 300度/秒 |
| 第2軸 | 300度/秒 | |
| 第3軸 | 720度/秒 | |
| 合成(TCP)*2 | 1000 mm/s | |
| 反覆定位精度*3 | ±0.03 mm | |
| 容許慣性慣量 | 0.026 kgm2 | |
| 本體重量 | 7.6 kg | |
| 設置形式 | 支架安裝/天花板安裝 | |
*1:定位PIN於原點銷孔中的設置原點姿勢的操作範圍。
*2:可搬重量為1 kg時的最高速度。3 kg時,速度為 300 mm/s。
*3:根據各軸減速機的規格值。
*建議電源容量為DC24V 170W
*2:可搬重量為1 kg時的最高速度。3 kg時,速度為 300 mm/s。
*3:根據各軸減速機的規格值。
*建議電源容量為DC24V 170W